斯坦福大学:锁眼成像 - 单光路非视线成像与目标追踪
:Non-Line-of-Sight and of Along a Path 锁眼成像 - 单光路非视线成像与目标追踪
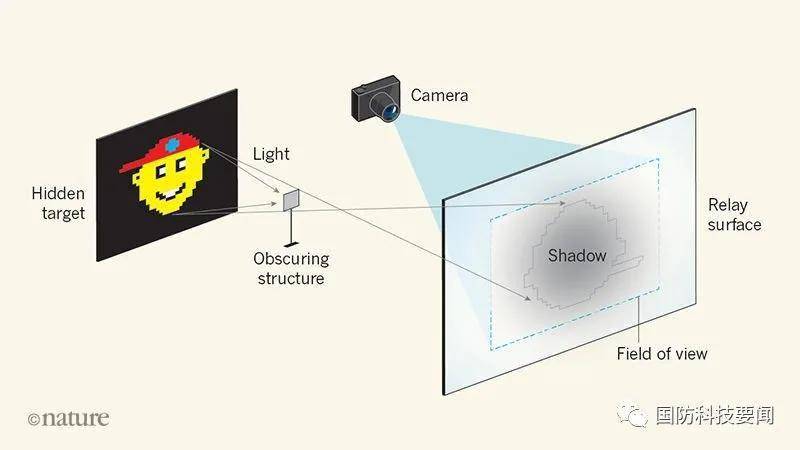
Non-line-of-sight (NLOS) and is an that the shape or of or to be from , time-of- 。 , NLOS the to scan a large area on a , where the light paths of are 。 In many , such as or , to a large area may not be , which the of NLOS 。
Here, we a new , , that a of along a path, for , a 。 that the of moves the time, we a of time- of the 's shape from 。 We based on - to the 's shape and using these 。 Then, with the help of long times and tape, we with a 。
非视线(NLOS)成像和跟踪技术作为一种新兴技术,可以从瞬时成像、光子飞行时间测量结果中恢复隐藏于拐角后方或散射介质背后的目标物体的形状或位置。 然而,现有的NLO方法需要成像系统在一处视野范围内可见的表面上进行大面积扫描,从而实现对隐藏物体所产生的间接光路的采样。在机器人视觉或自主驾驶等应用中,可能无法实现对某一大面积区域进行光学扫描,这严重限制了现有NLOS技术的实用性。 在本文中,我们提出了一种新的方法,称之为锁孔成像,其沿着单个光路捕获一系列瞬态测量值,类似于如通过锁孔进行成像。 假设感兴趣的隐藏目标在拍摄过程中期间产生了位移,我们有效地从未知的视点捕获目标形状的一系列时间分辨的投影。 我们基于期望最大化推演出逆向恢复方法,使用改方法可以利用这一系列锁孔成像测量值来恢复对象目标的形状和位置。 最后,通过利用长时间曝光和逆向反射胶带,我们成功展示了一套锁孔成像原型系统及其试验结果。
DOI:10.1109/TCI.2020.
in:IEEE on (: 7)
Page(s):1- 12
Date of :22 2020
ISSN :
ISSN:2333-9403
CD:2334-0118
Print ISSN:2573-0436
:
DOI:10.1109/TCI.2020.
:IEEE
:
10.13039/- ;10.13039/- ;10.13039/-Oak Ridge for and ;10.13039/-U.S. of ;10.13039/- of the of ; ;NSF ;Sloan ;KAUST of ; CCF;