EtherCAT运动控制卡和LabVIEW构建智能装备(五)
今天,正运动小助手给大家分享一下运动控制卡之的硬件接线和如何使用进行小线段连续插补的前瞻处理运动开发。
一、 硬件介绍
系列运动控制卡支持多达16 轴直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴和机械手指令等;采用优化的网络通讯协议可以实现实时的运动控制。
系列运动运动控制卡支持以太网,232 通讯接口和电脑相连,接收电脑的指令运行,可以通过总线和CAN总线去连接各个扩展模块,从而扩展输入输出点数或运动轴。
系列运动控制卡的应用程序可以使用 VC、VB、VS、C++以及C#等软件来开发,程序运行时需要动态库 .dll。调试时可以把软件同时连接到控制器,从而方便调试,方便观察。
二、 进行运动控制开发 1.将“光盘资料”里面的Vi函数库“”文件夹下载到电脑中,然后复制到安装路径下/user.lib的文件夹内。
2.查看PC函数手册,熟悉相关函数接口。
(1)PC函数手册也在光盘资料里面,具体路径如下:“光盘资料\8.PC函数\函数库2.1\函数库编程手册 V2.1.pdf”
(2)PC编程,一般如果网口对控制器和工控机进行链接。网口链接函数接口是();如果链接成功,该接口会返回一个链接句柄。通过操作这个链接句柄可以实现对控制器的控制。
(3)使用轴参数设置相关的指令操作链接句柄“”,对控制器进行轴参数的设置,轴参数设置相关的指令如下。
(4)使用轴参数设置相关的指令操作链接句柄“”,对控制器进行轴参数的设置,前瞻模式设置相关的指令如下。
3.进行小线段连续插补的前瞻运动。
(1)新建Vi,在前面板,右键鼠标,选择控件进行UI设计,如图所示,左边是连接界面,右边是多条小线段对应点的位置。
(2)在程序编辑框中通过鼠标,选择“平铺顺序结构”然后右击选择“在后面添加帧”,接着在后面添加的帧里面添加“While循环”,在“While循环”里面又添加“事件结构”。
通过事件结构里面的“超时处理”对控制器的运动状态、运动速度、运动位置,剩余缓冲区以及当前mark运行号监控。
(3)选择事件结构,右击选择添加事件分支,选择“连接”值改变,然后在该事件分支中使用“Z Aux Open Eth.vi”函数对控制器进行连接,以实现连接控制器按钮的功能。
(4)选择事件结构,右击选择添加事件分支,选择“断开”值改变,然后在该事件分支中使用“Z Aux Close.vi”函数对控制器断开连接,以实现断开链接按钮的功能。
(5)选择事件结构,右击选择添加事件分支,选择“坐标清零”值改变,然后在该事件分支中使用“Z Aux Set Dpos.vi”函数设置控制器轴位置等于0,以实现坐标清零按钮的功能。
(6)选择事件结构,右击选择添加事件分支,选择“停止”值改变,然后在该事件分支中使用“Z Aux .vi”函数实现停止轴运动的功能。
(7)选择事件结构,右击选择超时事件,选择“启动”值改变,然后在该事件分支中使用相关Vi函数对控制器运动参数进行设置并开始运动,以实现运动按钮的功能。
A.通过该事件分支中的“层叠式顺序结构”第0帧中调用轴参数设置相关的Vi函数,先对控制器轴参数进行设置并开启连续插补功能。
B.通过该事件分支中的“层叠式顺序结构”第1帧中进行设置对应的前瞻模式以及加减速度,起始速度,减速角度以及停止角度等参数设置相关的Vi函数,让运动过程相对平滑。
C.通过该事件分支中的“层叠式顺序结构”第2帧中调用动作小线段连续插补,并在运动进行的过程中对应判断剩余缓冲区大小是否足够继续加载进入缓冲区,并进行读取当前运动标号,显示在界面上。
三 、调试与监控
编译运行例程,同时连接软件进行调试,对运动控制的轴参数和运动情况进行监控。
1.功能前瞻设置说明。
系统的速度前瞻功能,一方面可以对指令进行整体规划,即对各段速度进行整体规划,再配合指令段内的加减速控制,可以使机床保持高速运行提高效率,使负载运动更加流畅,告别停停走走,系统通过Merge速度融合功能实现。
另一方面,再保证高速运行基础上为了限制机械冲击和过切等,还需进行减速识别,通过提前识别轨迹变化。
从而按照安全的减速度提前减速,系统通过减速/停止融合功能、抑制冲击功能实现。从整体来看,速度前瞻功能既可提升整机效率,也可减少冲击增加柔性,降低零部件磨损,增加设备使用寿命。
拐角减速功能解决的问题是:当指令间夹角过大时,如果仍以较大速度运行,会在夹角处产生较大的机械冲击,轨迹偏离。
控制器会对指令间轨迹变化的夹角进行提前识别,比较其与减速/停止角的大小关系,提前决定是否进行减速,保证在指令连接处平稳过渡。
2.查看打开示波器对轴运动情况进行监控。
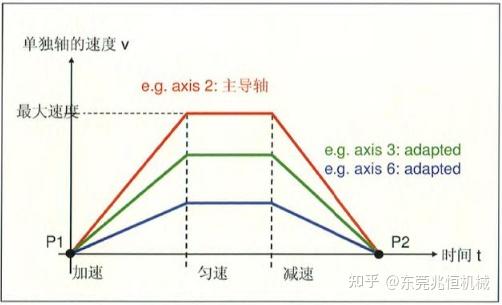
如下图所示,OA过渡AB段位置时角度小于减速角度则,S1-S2段不进行减速,AB过渡BC段时角度大于减速角度则进行减速处理过渡过程如S2-S3段,BC过渡CD段角度大于停止角度速度需要降到零如S3-S4段位置处理。
连接软件通过软件右侧的轴参数进行控制器状态监控,也可以点击“视图”→“示波器”打开示波器对轴运动情况进行监控。
A.开启倒角模式后图形运行效果会在拐角处对应处理倒角情况,如下图对比所示:
B.开启拐角减速模式后拐角的角度达到一定减速角度或者停止角度,拐角位置会对应进行处理,如下图所示:
运动控制卡和构建智能装备(五)
本次,正运动技术运动控制卡和构建智能装备(五),就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。