机器人硬件知识储备(一) —— 移动平台
前言
一个真实的机器人系统不单单由软件组成,硬件也是一个绝对不能缺少的部分。更多情况下,在外界人士眼里,硬件才是机器人的主体。那么身处机器人行业的程序猿们怎么能不具备对机器人硬件有最基本的知识储备呢?
0. 移动平台:
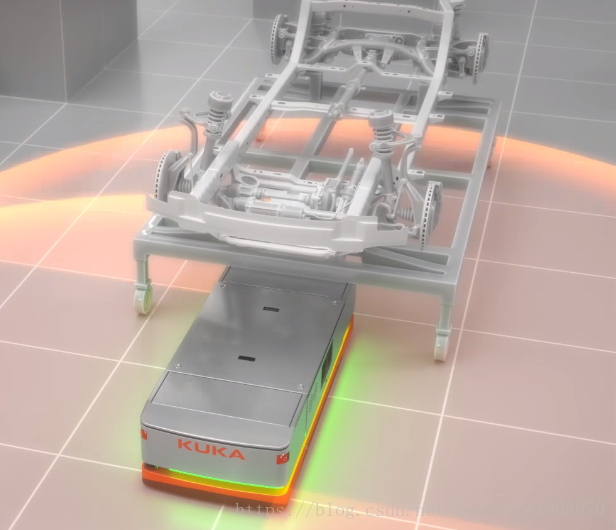
近年来,AGV在智能物流、智能工厂中投入应用,机器人移动平台开始以一种全新的姿态进入普通人的视野。比如下图的KUKA KMP 1500
很多机器人具备四处移动的能力,移动平台就是一些执行器为了达到移动的目的而组成的结构。
虽然在机器人研究领域里,双足机器人是一个十分受欢迎的课题,但是由于轮子结构简单,工业上容易生产,再加上轮子的稳定性优良,对于常见的机器人工作环境(比如:平滑的地面,崎岖的地面)还是轮子较为节能,所以绝大多数机器人依然使用轮子来驱动。
0.0 两轮差分驱动

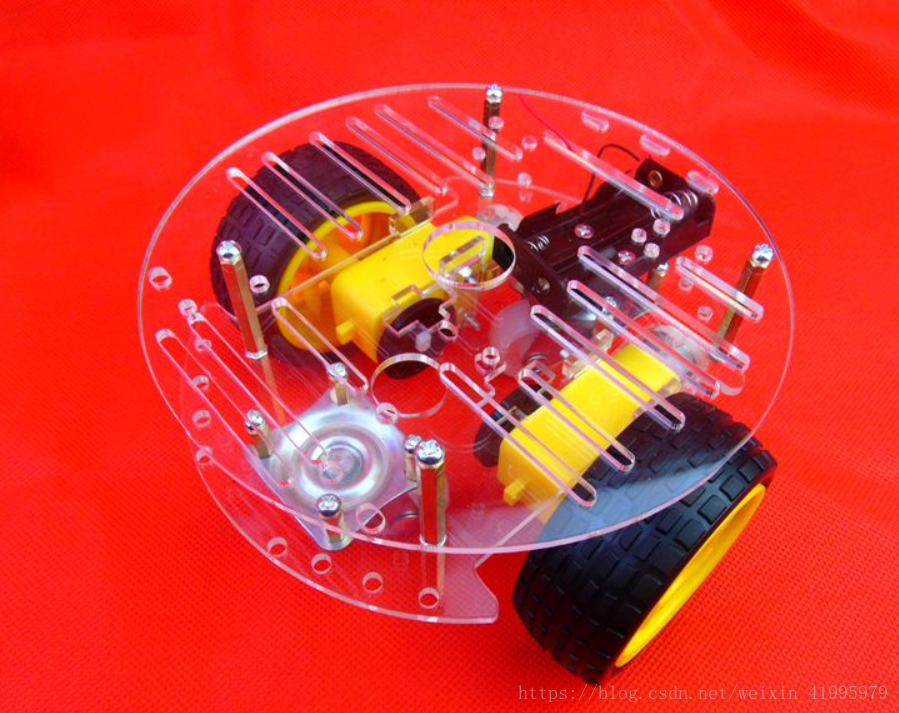
在轮式移动平台中,两轮差分驱动恐怕是最简单的了。它包括两个独立控制的驱动轮,一般还会带有1~2个从动的万向轮。这种底盘驱动方式很简单,两个轮子进行差速控制就能够使小车直走、后退、转向。就像下图这种,就是一台十分简陋的两轮差分驱动底盘。复杂的比如再下面的EAI的,这个小车底盘可以实现的已经不单单是无脑的移动了,它搭载了超声波,激光雷达等传感器,已经可以用来进行ROS的学习,实现自主建图,和自主避障等等功能。

0.1 三轮差分驱动
这部分请看我另一篇博文,里面有对这类移动平台的简单介绍和运动学讲解
浅谈三轮全向移动平台
0.2 四轮差分驱动
前面介绍了三轮的全向移动平台,现在来看一下四轮的结构,

- 0.2.0 四轮双驱
小时候经常会玩遥控车,那会还见不到差速控制的遥控车(暴露年龄。。。),小朋友们玩的遥控车都是后轮负责动力,前轮控制方向的结构,这便是所谓的四轮双驱。大部分汽车都是采用这种十分传统的结构。
- 0.2.1 四轮四驱
- 0.2.1.0 普通四驱
普通的四驱移动平台,一般采用前后四轮的结构,每个轮子都可以独立控制,驱动方式跟二轮差分驱动类似,同样可以使用差速控制实现移动平台的前进、后退、转弯。
- 0.2.1.1 麦克纳姆轮四驱
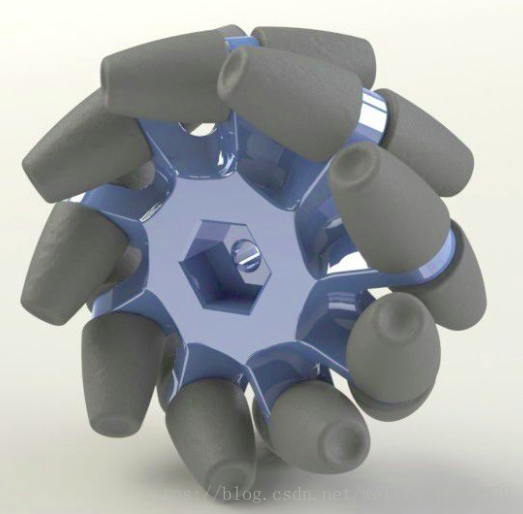
麦克纳姆轮是瑞典麦克纳姆公司的专利。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中
心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平
台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小
滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络
线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位
轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
(资料来自百度百科)