路径规划-A*算法
A*算法原理
A*算法通过包含启发信息的代价函数来搜索最优路径,代价函数()由两部分组成:起点沿着已生成的路径到达当前节点的开销()和当前节点到终点的预估开销ℎ(),
可由公式(1)表示: () = () + ℎ() (1)
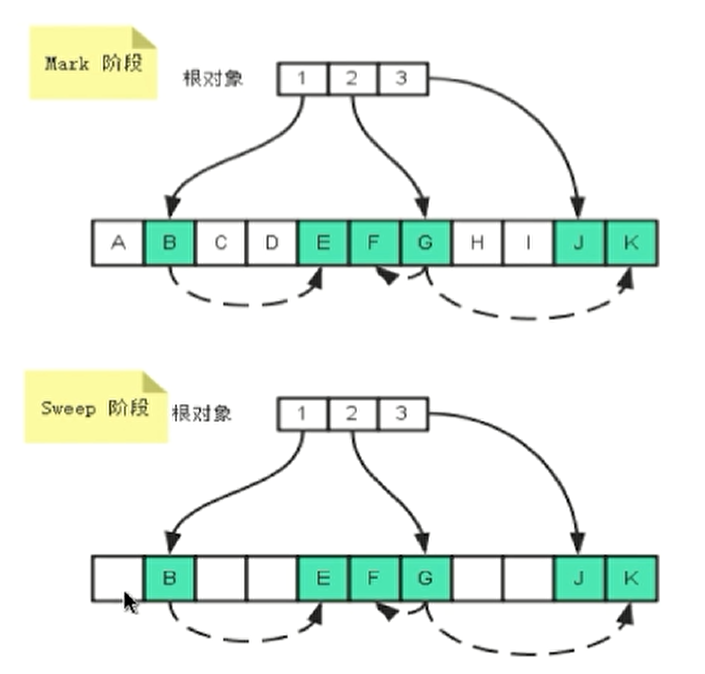
A*算法建立并维护两个列表(open列表和close列表)
存放已经探测到但还未访问节点的Open列表和存放已经访问过节点的Close列表。
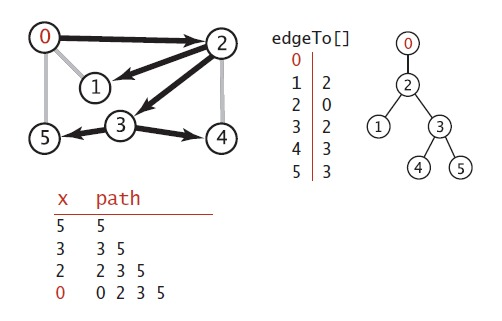
路径上每个节点都有一个指向父节点的指针,通过跟踪指针向前回溯即可找到最佳路径。
A*算法流程
A*算法主要是将节点划分为未考察的、待考察的以及已考察的三大类。刚开始时的(所有)节点都是未考察的,而待考察的节点则全都被放在open-table中,所有已经被考察过的节点全都放在close-table中。因此,明显的 open-table、close-table 表起初都是空的。
算法细节如下:
:重置数据;如:需要重置start-node 的 g-value = 0;h-value = -func(........);
:将 start-node 入 open-table;
// 第一层循环逻辑开始
:取出open-table 中 f-value 值最小的节点作为 -node,并做如下处理。(刚开始时,f-value 最小肯定是 start-node,因为表中只有这个节点)
:如果 -node 不存在,则寻路失败退出
:如果 -node 为 end-node,则寻路成功退出,并将 end-node 的前驱节点置为 -node,然后返回由 end-node 逆序倒推其前驱节点直到 start-node 的所有节点组成的路径返回
:将 -node 入 close-table;
// 第二层循环开始
:逐个遍历 -node 的 -node,并做如下处理
:如果 -node 在闭表中,则不做任何处理
:如果 -node 不在开表中,则更新其 g-value、h-value 值;并将该 -node 的前驱节点置为 -node 节点,最后再将 -node 入 open-table
:如果 -node 已在开表中,则比较如果从当前的 -node 到该 -node 的 g-value 是否会比 -node 此时的 g-value 值更优(即:更小)。
如果不会更优,则不做任何处理;
如果会更优,则将 -node 的 g-value 值更新为从当前 -node 到 -node 的 g-value 值,并将 -node 的前驱更改为当前的 -node节点
:回到 继续处理下一个邻接节点
:只要 open-table 表非空,则继续回到 处理
A*算法缺点
标准 A*算法在扩展节点时比较盲目,可能将多余节点加入 Open 表,增加了维护 Open 表代价的同时扩大了搜索空间,导致算法在大范围空间下搜索效率不够理想。
改进A*算法[1]
本文采用双向搜索机制,同时开展从起点向终点的正向搜索和从终点向起点的反向搜索,逐步生成路径节点向中间靠拢;在扩展过程中依据方向信息对候选的节点进行筛选,过滤掉一些无效节点,提升搜索效率;最后对生成的路径进行修饰,删除冗余点,提升路径质量。
其中 S 是起始 位置,m 是被扩展到的节点,D 是目标位置。路径规划期望路径长度尽可能短,即路径方向尽可能贴合起点指向终点的方向。是当前节点到终点的方向 与期望方向的角度偏差,由公式(2)表示,||越小,节点 m 被加入 Open 表的可 能性越大。
--------------------------------------------------------------------------------------------------------------------------------