十六.镜头知识之工业镜头的质量判断因素
十六.镜头知识之工业镜头的质量判断因素
文章目录 6 镜头
工业镜头的质量判断因素在评价自动化工业镜头质量时一般还会从分辨率、明锐度和景深等几个实用参数判断: 1.分辨率()
又称鉴别率、解像力,指镜头清晰分辨被摄景物纤维细节的能力,鼎纳工业镜头分辨率的原因是光的衍射现象,即衍射光斑(爱里斑)。分辨率的单位是“线对/毫米“ (lp/mm)。
镜头的空间分辨率、相机像素分辨率和相机的空间分辨率、系统空间分辨率和系统分辨率是几个极容易混淆的概念。
镜头空间分辨率表示它的空间极限分辨能力,常用拍摄正弦光栅的方法来测试。如果从信号处理的角度来看,任何非周期图像信号都可以被看作周期图像(或子图像)的叠加,而任何周期图像又都可以被分解为亮度按正弦变化的图形的叠加。因此,通过研究镜头对亮度按正弦变化图形的反应,就可以研究镜头的性能和分辨率。正弦光栅就是亮度按照正弦变化的图像,如下图所示:
其中棚格黑白相间,可把黑色看作正弦波谷,把白色看作正弦波峰。正弦光栅中一对相邻黑线和白线称为一个线对(line pair,lp),它所占据的长度被定义为正弦光栅的空间周期,单位是毫米。正弦光栅空间周期的倒数就是空间频率( ),它表示每毫米内的线对数,单位是线对/毫米(Ip/mm)。通过拍摄正弦光栅,研究镜头每毫米内能分辨的线对数,就可以获知镜头的分辨率。镜头分辨率越高,则说明其每毫米内能分辨的线对数越多。对于机器视觉系统设计来说,只需要查询镜头参数表即可获知其分辨率。
相机像素分辨率是指相机传感器上纵横方向上的像素数。
相机的空间分辨率却表示它的空间极限分辨能力。根据前述相机奈奎斯特定律,相机要能恢复空间图像,必须至少使用2个像素来表示图像的最小单元。如果用研究镜头的空间分辨率类似的方法来研究相机空间分辨率,则正弦光栅中的每对线需要至少2个像素来表示。由此,可以通过像素的物理大小来计算相机的空间分辨率。例如,某相机的像素物理大小为8.4um×9.8um,则相机在横纵方向上的空间分辨率为:
对于镜头和相机构成的成像系统来说,整个系统的空间分辨率取镜头和相机空间分辨率的最小值。
2.明锐度()
也称对比度,是指图像中最亮和最暗的部分的对比度。
3.景深(DOF): 4. 最大相对孔径与光圈系数
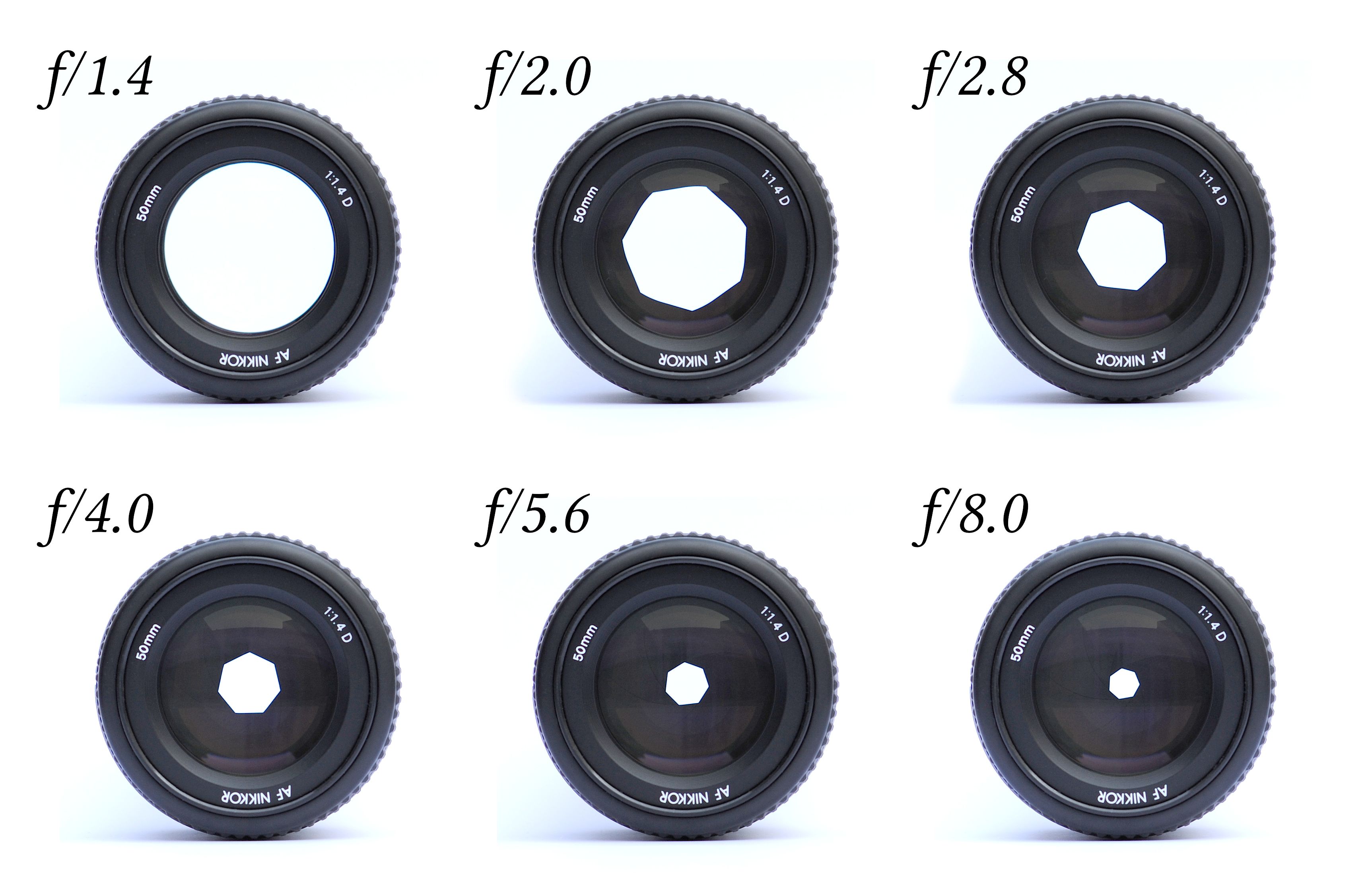
相对孔径,是指鼎纳工业镜头的入射光孔直径(用D表示)与焦距(用f表示)之比,即:相对孔径=D/ f 。
相对孔径的倒数称为光圈系数( scale),又称为f/制光圈系数或光孔号码。
一般镜头的相对孔径是可以调节的,其最大相对孔径或光圈系数往往标示在工业镜头上,如1:1.2或f/1.2 。如果拍摄现场的光线较暗或曝光时间很短,则需要尽量选择最大相对孔径较大的工业镜头。
5.工业镜头各参数间的相互影响关系
一支高性能的自动化工业镜头,在分辨率、明锐度、景深等方面都有很好的体现,对各种像差的校正也比较好。
5.1.焦距大小的影响情况
焦距越小,景深越大;

焦距越小,畸变越大;
焦距越小,渐晕现象越严重,使像差边缘的照度降低;
5.2.光圈大小的影响情况
光圈越大,图像亮度越高;
光圈越大,景深越小;
光圈越大,分辨率越高;
5.3.像场中央与边缘
一般像场中心较边缘分辨率高
一般像场中心较边缘光场照度高
5.4.光波长度的影响
在相同的工业相机及镜头参数条件下,照明光源的光波波长越短,得到的图像的分辨力越高。所以在需要精密尺寸及位置测量的视觉系统中,尽量采用短波长的单色光作为照明光源,对提高系统精度有很大的作用。
置测量的视觉系统中,尽量采用短波长的单色光作为照明光源,对提高系统精度有很大的作用。
6 镜头 6 .1镜头选型案例
镜头通常与光源、相机一起构成一个完整的图像采集系统.
因此相机镜头的选择受到整个系统要求的制约。
相机镜头主要参数:焦距、光圈、对应最大CCD尺寸镜头成像直径可覆盖的最大CCD芯片尺寸、接口镜头与相机的连接方式、景深、分辨率、工作距离镜头第一个工作面到被测物体的距离、视野范围、光学放大倍数、数值孔径、后背焦等等。
\1. 焦距() 焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。焦距的大小决定着视角的大小,焦距数值小,视角大,所观察的范围也大;焦距数值大,视角小,观察范围小。根据焦距能否调节,可分为定焦镜头和变焦镜头两大类。
\2. 光圈(Iris)用F表示,以镜头焦距f和通光孔径D的比值来衡量。每个镜头上都标有最大F值,例如8mm/F1.4代表最大孔径为5.7毫米。F值越小,光圈越大,F值越大,光圈越小。
\3. 对应最大CCD尺寸() 镜头成像直径可覆盖的最大CCD芯片尺寸。主要有:1/2″、2/3″、1″和1″以上。
\4. 接口(Mount)镜头与相机的连接方式。常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
\5. 景深(Depth ,DOF) 景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。景深随镜头的光圈值、焦距、拍摄距离而变化。光圈越大,景深越小;光圈越小、景深越大。焦距越长,景深越小;焦距越短,景深越大。距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
\6. 分辨率() 分辨率代表镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:“线对/毫米”(lp/mm)。分辨率越高的镜头成像越清晰。
\7. 工作距离(,WD)镜头第一个工作面到被测物体的距离。
\8. 视野范围(Field ,FOV) 相机实际拍到区域的尺寸。
\9. 光学放大倍数(,ß)CCD/FOV,即芯片尺寸除以视野范围。
\10. 数值孔径( ,NA)数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sina/2。数值孔径与其它光学参数有着密切的关系,它与分辨率成正比,与放大率成正比。也就是说数值孔径,直接决定了镜头分辨率,数值孔径越大,分辨率越高,否则反之。
\11. 后背焦()准确来说,后倍焦是相机的一个参数,指相机接口平面到芯片的距离。但在线扫描镜头或者大面阵相机的镜头选型时,后倍焦是一个非常重要的参数,因为它直接影响镜头的配置。不同厂家的相机,哪怕接口一样也可能有不同的后倍焦。
了解相机镜头的主要参数后,那么[选择合适的相机镜头要考虑哪些问题]
\1. C接口还是CS接口,C接口的接口距离是17.5mm,CS接口的接口距离是12.5mm,用错了就不能合焦;
\2. 要根据感光器件的大小来选择镜头,是2/3寸感光芯片的要选择对应成像圈的镜头,如果选择了1/3"或1/2“的,会出现很大的暗角。
\3. 选择焦距,即选择视野范围比观测范围稍大一点的镜头。
\4. 景深与光环境的配合,光线充足,配备光源照射的地方可以选用小光圈,加大景深,提高拍摄清晰度。光线不足的地方需要稍大一点的光圈或采用高感光度的感光芯片
例如,要给硬币检测成像系统选配工业相机镜头,约束条件:相机CCD 2/3英寸,像素尺寸4.65μm,C口。工作距离大于200mm,系统分辨率0.05mm。光源采用白色LED光源。
基本分析如下:
\1. 与白色LED光源配合使用的,镜头应该是可见光波段。没有变焦要求,选择定焦镜头就可以了。
\2. 用于工业检测,其中带有测量功能,所以所选镜头的畸变要求小。
\3. 工作距离和焦距
成像的放大率M=4.65/(0.)=0.093
焦距f’=LM/(M+1)=2000.093/1.093=17mm
物距要求大于200mm,则选择的镜头要求焦距应该大于17mm。
\4. 选择镜头的像面应该不小于CCD尺寸,即至少2/3 英寸。
\5. 镜头的接口要求是C口,能配合相机使用。光圈暂无要求。
从以上几方面的分析计算可以初步得出这个镜头的“轮廓”:焦距大于17mm,定焦,可见光波段,C口,至少能配合2/3英寸CCD使用,而且成像畸变要小。按照这些要求,可以进一步的挑选,如果多款镜头都能符合这些要求,可以择优选用。
6.2 镜头选型助理