Raspberry Pi 之 SenseHAT 开发笔记
是 Pi 家族的标准组件,不仅在硬件设计一与 Pi 浑然天成,无需任何改动或添加即可完全接入 Rpi,而且在软件上也能得到 官方的支持,无论是 平台还是 平台都提供了完整的驱动和模块,非常方便使用和教学。
本文记录了有关 Sense-HAT 的知识,及学习、开发细节。
Sense-HAT 主板
1. Sense-HAT 引入
1.1 发展及历史
Sense-HAT 创立之初是作为 Astro-Pi 项目的一个基本组件。Astro-Pi 是 ESA( Space 欧洲航天局) 发起的一项年度科学探索与编程竞赛,其中,由学生编写的代码将有机会在国际空间站上运行,但目前此项竞赛仅对 ESA 成员国开放。
Astro-Pi致力于展示计算机编程的魅力,鼓励在校生提高数字写作技能,培养它们对于 STEM 学科的兴趣。空间飞行常被青年们视为令人兴奋和及具创造性的活动。Astro-Pi 给了他们一个能够主动参与空间科学探索的机会,实地探索空间创新,实现创意愿望,而不仅仅是作为一个旁观者。
Astro-Pi 项目不限于在太空站中开展,也在教室中进行。它由 Rpi 计算机和 Sense-HAT 传感器板组成,Sense-HAT 用以感知所在的空间环境,检测运动,获取地球磁场信息。
Sense-HAT 作为 Astro-Pi 硬件,已展示出了其非凡和独特的能力。
1. 安装配置
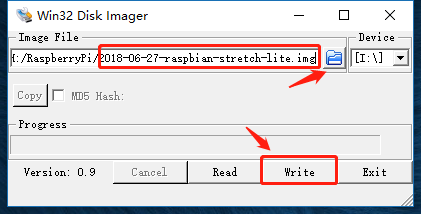
新的 到手,通常还需要进行硬件的安装。
1.1 40pin引脚安装
与其它板子引脚焊接方式不同,Sense-HAT 的引脚居然与板子是分离的,而板子上焊接的是引脚座,需要装引脚插入引脚座中,一般对准孔位后用力按压即可完成。
1.2 扩展板安装
安装好引脚后,就可以装引脚对准 Rpi主板的插座进行安装了。
1.3 加电
很快安装好硬件,进行加电测试,可以发现,加电后 HAT 的LED阵列以一种七彩的方式显示,这时HAT板实际上处于一种空置状态,Rpi并没有真正管理HAT。
1.4 配置HAT
Rpi是通过I2C接口与HAT通信的,因此,需要在中的配置选项中打开 I2C 使能开关。
1.5 安装驱动
由于HAT是官方标配的硬件,系统已经开发了针对HAT的驱动程序,直接安装即可。
$ sudo apt-get sense-hat
很多时候,都不需要安装,因为系统已安装好了。
驱动安装完成后,会有 /usr/src/sense-hat 目录
其中 都是案例,可以运行。
1.6 添加配置
这时,我们发现还不能正常使用HAT,在 /boot/.txt 还要添加相应的配置选项。
在配置文件 .txt 末尾添加如下一行
=rpi-sense
1.7 重新启动
完成以上步骤后,需要重新启动Rpi。启动时 HAT 会如以前一样显示彩虹灯面板,便随着驱动的成功加载,灯会很快熄灭,也就是说如果灯熄灭了,则表示驱动加载成功。
2. 功能测试
2.1 LED
由于是官方硬件,自带Sense-HAT的扩展模块,可以很方便的进行测试。
下面是一个版本的LED走马灯程序,依次点亮 LED
下面是一个 版本的 走马灯程序
#!/usr/bin/env
from
time
sys
black=[[0,0,0]]*64
sense=()
sense.(black)
while 1:
for x in range(0,8):
for y in range(0,8):
sense.(black)
sense.(x,y,255,255,255)
time.sleep(0.05)
经过测试,命令对于 LED 灯状态的切换时间最小可以达到0.3秒,而 命令对于 LED 灯状态的控制速度可以达到0.02秒,而且还可以再快,但如果再快,则硬件速度跟不上了,则会出现 跳灯的情况,即部分LED灯不会被点亮,而直接跳到下一灯的情况。
2.2 IMU 功能测试
Sense帽有一个IMU(( Unit惯性测量单元)芯片,其中包括一组检测运动的传感器:
•一个陀螺仪 (用来检测板上的方向) GYRO 希腊语 "旋转"
•加速度计 (用于检测运动)
•磁力仪 (用于探测磁场)
我们都知道地球绕着南北两极之间的一个轴旋转。我们也可以将增加三个轴,这些都是:
•俯仰pitch
•滚动roll
•偏航yaw
如果把树莓派的网络和USB接口看作飞机的头的话,那么就可以较好理解这三个转轴。
yaw 就是航向,表示飞机的水平飞行方向
roll 就是滚动,表示飞机围绕着自己的中轴翻滚
pitch 俯仰就是机头向上抬起,或机头向下俯冲
提供的 扩展板插件中提供了以下的三个传感器数据的支持
一种简单的测试方法是,直接用传感器的值来定义角色面向的方向
如上图所示,箭头角色的方向由 yaw 值来决定。
试验发现,这三个变量的取值非常不稳定,而且对于动作有一定的延迟效果,数值抖动非常厉害。用下面这个实验可以发现。将小球在 x, y 坐标上的增量设为 roll 和 pitch 值,观察小球的运动。
小球实际上做的是类似分子的布朗运动,抖动非常厉害。