双导程蜗杆设计及应用,双导程蜗杆调节原理!
您在日常工作中接触到的蠕虫驱动器并不多。在您的行业中进行设计时,您是否经常使用蜗杆传动?我们通常看到的圆柱形蠕虫最多。在我的理解中,单头蠕虫比较容易处理,精度可以保证,但是效率低。多头蜗杆效率高,但加工难度大,精度相对较低。
但即便如此,蠕虫的使用还是有其独创性的。接下来分享一下越南设计师Duc Thang绘制的蜗杆传动的机械结构。小编整理了大约84种蜗杆传动设计。您可以在工作中找到许多结构的原型。由于内容量大,恐怕短时间内大家都难以消化。小编分为上中下三篇与大家一一分享。
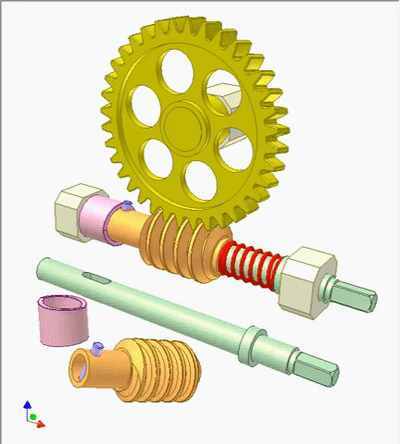
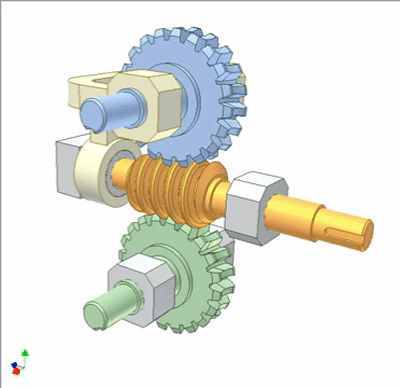
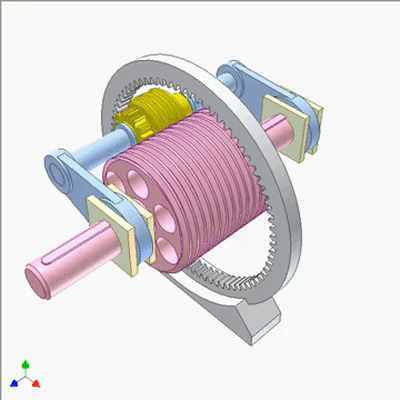
蜗杆传动 1:变速箱
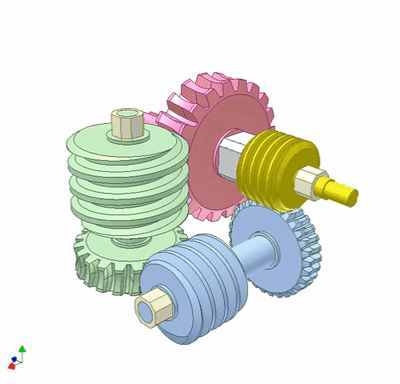
三个蜗轮驱动的串行连接。输入端为黄色蜗杆,输出端为粉色蜗轮,它们是同轴的。每个驱动器的传动比:i1、i2、i3。总比i=i1×i2×i3=30×20×20=12000。
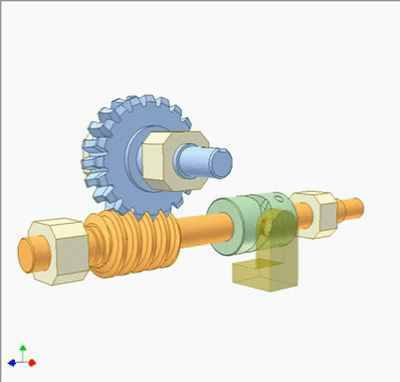
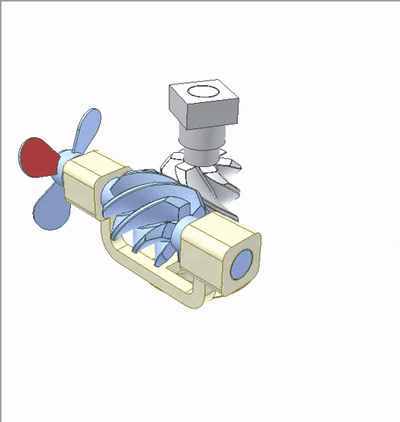
蜗杆传动 2:变速箱
一根丝杠同时带动3个齿轮,齿轮轴与丝杠轴线成直角。这种配置可以替代更昂贵的齿轮装置。
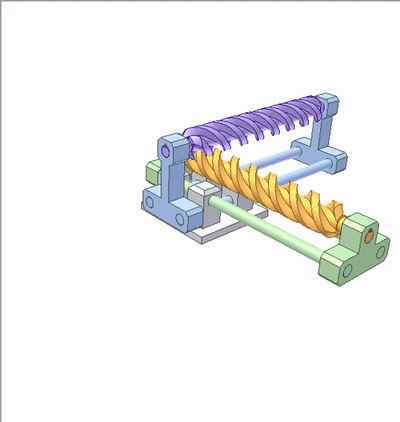
蜗杆传动3:滚动蜗轮
蜗轮在蜗杆上滚动,调整两个滚轮的轴距。
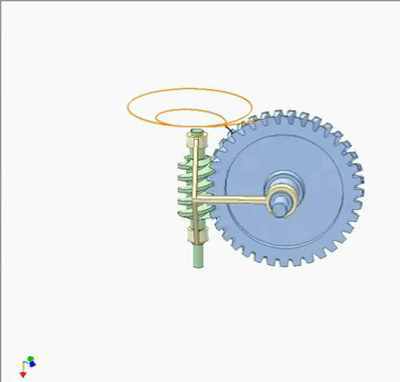
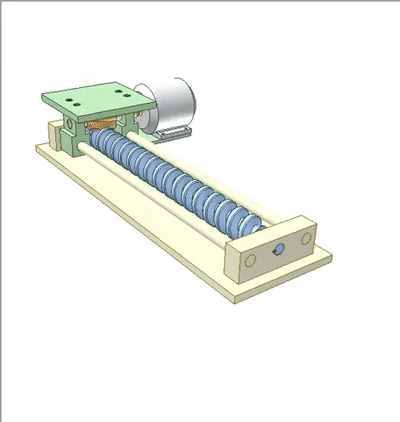
蜗杆传动4:旋转滚动蜗杆
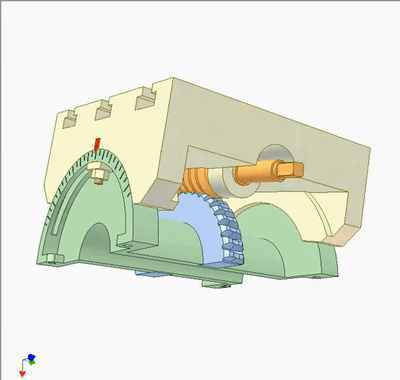
机床转盘,蜗杆绕其轴线旋转,同时在蜗轮上滚动。
蜗杆传动 5a:旋转和平移蜗杆
输入蜗杆除了旋转外,还通过圆柱凸轮做纵向运动,蜗轮反方向旋转。
蜗杆传动 5b:旋转和平移蜗杆
蜗杆传动由工作轴上的凸轮补偿,从而产生齿轮的间歇运动。输入是绿色轴。橙色单头蜗杆与绿色轴之间有定位接头。粉红色的凸轮静止不动。凸轮轮廓由两条相反方向的螺旋曲线组成,曲线的螺距等于蜗杆的螺距。红色弹簧保持凸轮和紫色销之间的接触。输入转一圈,齿轮保持静止,然后转动一个齿。
蜗杆传动6:围绕蜗杆旋转的齿轮
齿轮绕着蜗杆转动,红色标志证明齿轮绕着它的轴心转动。绕蜗轮轴旋转1圈,齿轮绕轴旋转Z1/Z2。 Z1:蠕虫的线程数。 Z2:齿轮的齿数。
蜗杆传动 7:旋转和滚动蜗杆轨道
蜗杆在其轴上旋转,同时在齿轮上滚动。蜗杆的点(在垂直于蜗杆轴并包含轮轴的平面内)沿环形螺旋线(绿色)移动。不在平面内的点沿着斜环面螺旋线(橙色)。
蜗杆传动 8:围绕蜗杆轨道旋转的齿轮
齿轮同时绕轴和蜗杆旋转。橙色线是齿轮点的轨迹,位于垂直于齿轮轴线并包含蜗杆轴的平面内。该点到齿轮轴的距离等于蜗杆与齿轮的轴距。
蜗轮驱动 9:滚子
车轮配有滚轮以减少摩擦损失。
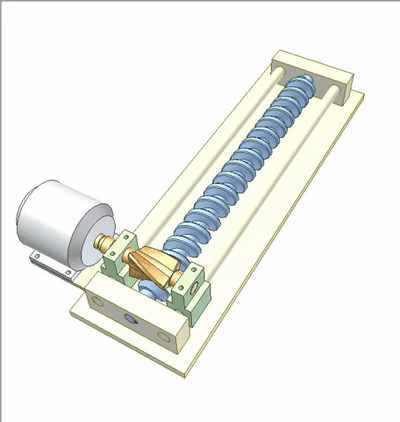
蜗杆传动 10:弹簧蜗杆
弹簧为蜗杆的传动提供了另一种思路,有助于吸收强烈的振动。
蜗杆传动11:弹簧蜗杆、针轮
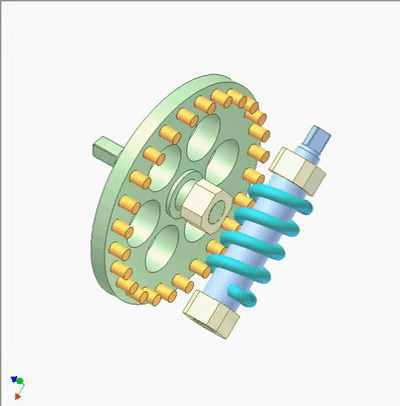
弹簧和销提供了蜗杆和蜗轮驱动的替代方案。
蜗杆传动 12:倍增器
输入端为绿色轮,橙色输出蜗杆为大螺距螺纹。
蜗杆传动 13:开槽轮
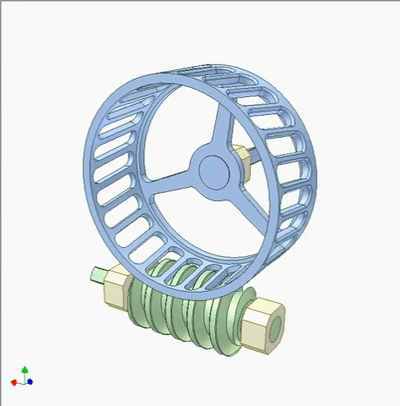
薄轮辋上的槽为生产车轮提供了另一种思路。
蜗轮驱动 14
橙色蜗杆的两个运动:旋转和平移导致绿色齿轮向相反方向旋转。注意:如果三个正齿轮排成一条直线(橙色中间齿轮与蓝色和绿色齿轮啮合),蓝色和绿色齿轮的旋转方向相同。即使在传动过程中也可以调整齿轮之间的相对角位置。
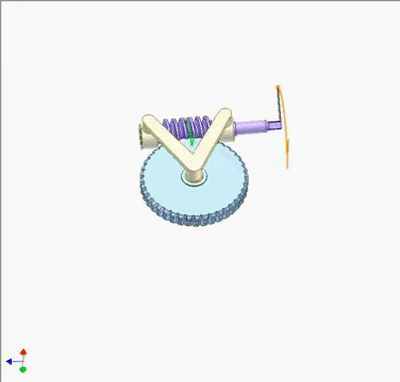
Worm - 蜗轮驱动 1
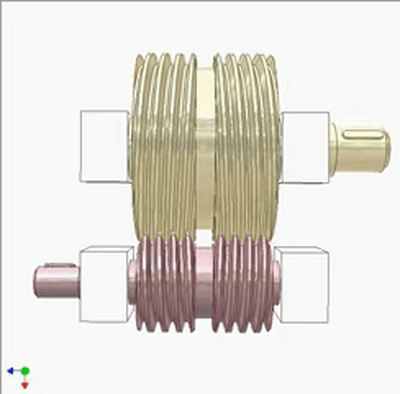
V型齿轮传动,其中齿与旋转平面的夹角很小,使动力传动完全静音。传动比为2。
小蜗杆:1头,导程t1,节径D1
大蜗杆:2个头,导程为t2,则t2=2t1,节圆直径为D2,则D2=2D1。
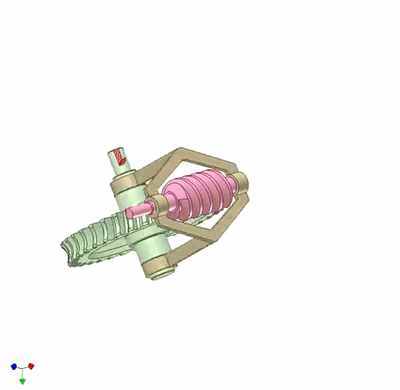
Worm - 蜗轮驱动 2
紫色曲柄承载橙色小齿轮(节距半径R2)和小蜗杆(1头,导程为t1,节圆半径为R3)。绿色大蜗杆为2头、导距为t2=2t1,节圆半径R4=2R3。灰色内齿轮(节圆半径R1=4R2)静止不动。
V4= Vc(1+A)
V4:绿虫的速度
Vc:紫色曲柄的速度
A=(R3/R4)×(R1/R2);在这个动画中,A=2,所以V4=3Vc。
蜗杆传动研究1
输入端为蓝色曲柄带黄色小蜗杆(1个头,导程为t1,节径为D1)。输出端为大蜗杆(2个头,导程t2=2t1,节距直径D2=2D1),输出和输入同速同向旋转,小蜗杆可以换成圆柱圆槽或齿条,如果黄色蜗杆与曲柄有旋转接头,蜗杆如果有足够的摩擦力,输出和输入也以相同的速度和方向旋转(黄色蜗杆不绕其枢轴旋转)。如果没有,输出旋转比输入慢。蜗杆直径不重要在运动学中。
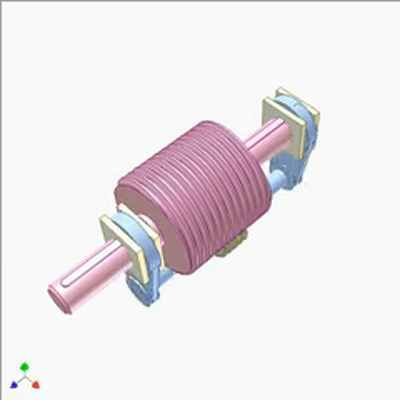
蜗轮驱动研究2
输入:小蜗杆,1头,导程t1,中径D1。
输出端:大蜗杆,2头,导程t2=2t1,节径D2=2D1。它与底座有一个滑动接头。
输出以 1 转的速度移动 t1。输出可以是圆形凹槽而不是螺纹。大蜗杆可以用齿条代替(如可调扳手)。如果大蜗杆圆柱形连接到底座,输出运动(线性和旋转)是不稳定的。
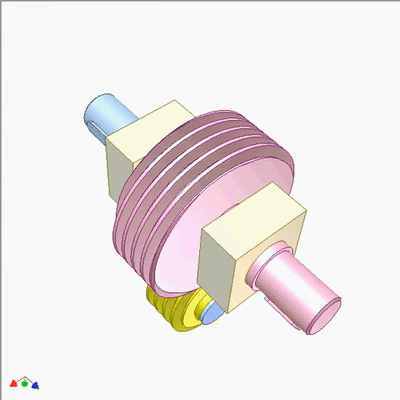
蜗杆传动研究3
输入:蓝色曲柄上固定一个小蜗杆(1头,导程t1,节径D1))。
输出端:大蜗杆,2头,导程t2=2t1,节圆直径D2=2D1。
输出以 1 转的速度移动 t2。小蜗杆可以换成圆柱形圆形凹槽或齿条。
行星蜗杆传动研究1
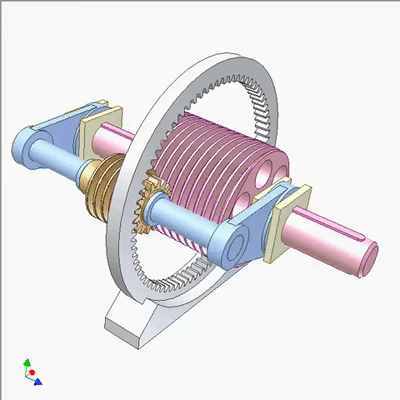
输入:蓝色曲柄。内齿轮(Z2=76) 齿)是静止的。环形槽的橙色蜗杆固定在橙色齿轮(Z1=16)的齿。橙色蜗杆在蓝色曲柄偏心轴上方转动。橙色蜗杆可以在粉红色大蜗杆上滚动减少摩擦。
输出:粉色蜗杆(lead=t2)输入1转内的直线运动量t2。
行星蜗杆传动研究2
输入:蓝色曲柄。内齿轮(齿数Z2=76)静止。黄色蜗杆(导程=t1,固定在黄色齿轮上(齿数Z1=16))。黄色蜗轮和偏心轴上的蜗杆蓝色曲柄空转。黄色蜗杆可以在粉红色大蜗杆上滚动以减少摩擦。
输出端:粉色蜗杆(导程t2=2t1),输入1转直线移动一定量S。
S=t2+(Z2/Z1)×t1
增加黄色蜗杆的数量以获得高负载能力。
双蜗杆传动1
蜗杆螺纹的导程角为 45 度。传动比为1:1,为90度变向传动。
双蜗杆传动2
白色的蠕虫是静止的。黄色支架绕白色蜗杆的轴旋转(速度S1),使蓝色的蜗杆绕自己的轴旋转(速度S2),S1=S2)。两个蜗杆的螺纹相同,蜗杆螺纹导程角为45度。
双蜗杆传动3
这两个蠕虫是相同的并且倾斜 90 度。蜗杆螺纹的导程角为 45 度。白色滑块是静态的。
携带橙色蠕虫的绿色滑块移动携带紫色蠕虫的蓝色滑块。齿轮比为1,可称为斜楔机构。
双蜗杆传动4
两个蜗杆倾斜90°,螺纹相同。蜗杆螺纹的导程角为 45°。粉红色的蠕虫是静止的。随着绿色蜗杆的旋转,蓝色滑块沿螺旋滚道移动。
当不需要齿条时,该机构可以代替齿条和小齿轮机构。缺点是效率低。减少粉红色蜗杆的导程角以提高效率。在这种情况下,绿色的蜗杆就变成了斜齿轮。
蜗轮驱动
橙色齿轮和蓝色蜗杆的轴倾斜 90°。固定蜗杆为1个头,轮齿数为3。随着橙色齿轮的旋转,绿色滑块沿螺旋滚道移动。
该机构可以在不需要制造齿条时替代齿条机构。
终于,一个更复杂的结构来了,看看你是不是晕了。
旋转过程中保持方向不变
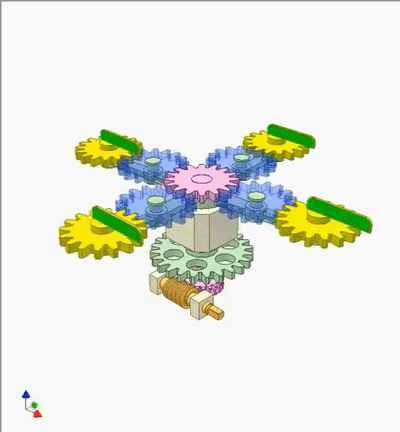
粉红色的齿轮、四个黄色的卫星齿轮、四个蓝色的齿轮和绿色的齿轮架组成差速行星传动。齿轮(除了绿色齿轮)具有相同的齿数。输入是一个周期性旋转的绿色载体。黄色齿轮在旋转过程中不改变方向,而粉色齿轮不移动。使用橙色蜗杆转动粉色齿轮来调整方向。动画显示 90° 调整。
今天就到这里,敬请期待“Worm Drive”(中)。 . .
郑重声明:本文版权归原作者所有,转载文章仅出于传播更多信息之目的。如果作者信息标注有误,请尽快联系我们修改或删除,谢谢。