机器人项目与产品开发
ROS(Robot )
ROS(Robot )是一个开源的机器人操作系统,旨在为机器人软件开发提供一个通用的、模块化的、分布式的软件平台。ROS由加州大学伯克利分校机器人实验室开发,目前已成为机器人领域最流行的开源软件平台之一。
ROS的主要功能包括硬件抽象、设备驱动、通信机制、程序库和工具等。ROS提供了一系列通用的机器人软件开发工具和库,如运动控制、感知处理、SLAM、人机交互等,同时也支持多种编程语言和操作系统,如C++、、等。这些工具和库可以帮助开发者快速构建机器人应用程序,并提高开发效率和软件质量。
ROS的核心概念是节点(Node)、话题(Topic)和服务()。节点是ROS中最基本的软件单元,用于执行特定的任务。话题是节点之间进行通信的基本单元,类似于发布/订阅模型。服务则是节点之间进行远程调用的机制,类似于客户端/服务器模型。
ROS的优点在于它提供了一个开放的、灵活的、可扩展的软件平台,可以支持各种机器人应用程序的开发。ROS还具有强大的社区支持和丰富的资源库,可以帮助开发者快速入门和解决问题。同时,ROS的开放性也促进了机器人技术的发展和普及,使得机器人技术越来越接近大众化。
Husky是一款室外自主导航机器人,由加拿大公司 开发。它是一款全地形机器人,具有强大的越障和自主导航能力,可以在复杂的室外环境中进行移动和操作。
Husky
Husky机器人采用了先进的传感器和控制系统,如激光雷达、摄像头、惯性测量单元和全球定位系统等,可以实现高精度的自主导航和环境感知。Husky机器人还配备了强大的计算和通信能力,可以支持多种机器人应用程序的开发和运行。
Husky机器人的应用领域非常广泛,如农业、采矿、建筑、环境监测等。在农业领域,Husky机器人可以用于种植、施肥、浇水等操作,可以提高农业生产效率和质量。在采矿领域,Husky机器人可以用于矿山勘探、地质勘测等操作,可以提高采矿效率和安全性。
总的来说,Husky机器人是一款先进的室外自主导航机器人,具有强大的越障和自主导航能力,可以在复杂的室外环境中进行移动和操作,将为各种应用领域带来更高效、更安全的解决方案。
EKF( )和UKF( )是两种常用的滤波算法,用于在机器人定位中进行状态估计和滤波处理。它们都是基于卡尔曼滤波( )的扩展版本,可以处理非线性系统和非高斯噪声的情况。
EKF是一种基于线性化的滤波算法,它使用非线性系统的一阶泰勒展开近似,将非线性系统转化为线性系统,然后应用标准的卡尔曼滤波算法进行状态估计和滤波处理。EKF的优点在于它简单易用、计算效率高,适用于大多数非线性系统的状态估计和滤波处理。然而,EKF的缺点在于它在非线性系统和高斯噪声下的估计效果较差,且容易出现发散的情况。
UKF是一种基于无损卡尔曼滤波( )的滤波算法,它使用一组无损采样点来代替非线性系统的概率分布,然后通过这些采样点来计算滤波器的状态和协方差估计。UKF的优点在于它能够更好地处理非线性系统和非高斯噪声,同时也能够减少线性化误差和计算复杂度。然而,UKF的缺点在于它需要更多的参数和计算资源,且在某些情况下可能出现估计偏差问题。
在机器人定位中,EKF和UKF都可以用于状态估计和滤波处理,但具体使用哪种算法要根据具体情况来决定。如果系统是近似线性的,噪声是高斯分布的,则可以使用EKF;如果系统是非线性的,噪声是非高斯分布的,则可以使用UKF。此外,还可以采用融合多种传感器数据的方法,如扩展卡尔曼滤波(EKF)、无损扩展卡尔曼滤波(UKF)和粒子滤波( )等,以提高定位的精度和鲁棒性。
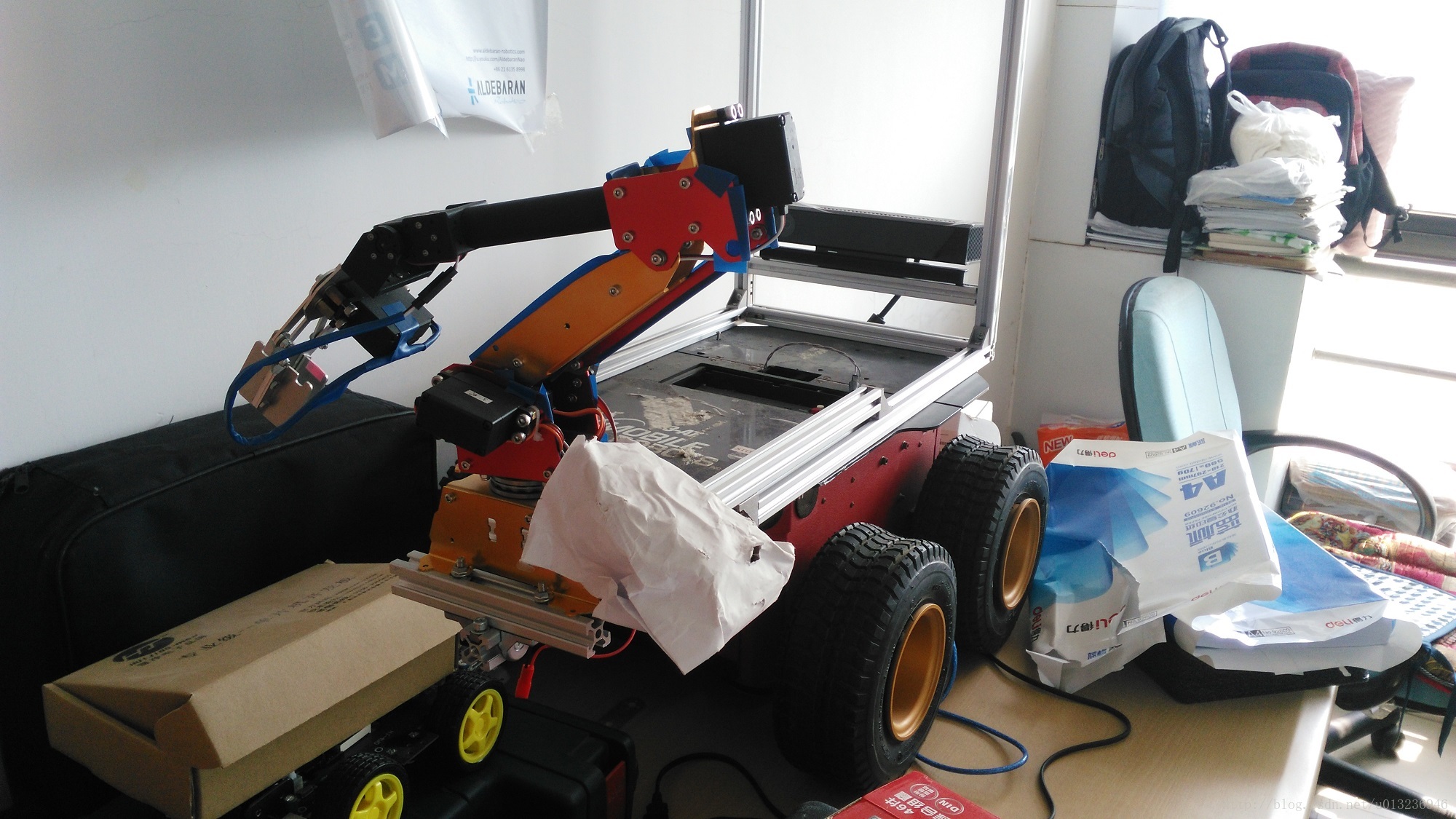
Husky移动抓取是一种机器人技术,可以使机器人在移动的同时完成抓取任务。通常,这种技术需要将移动机器人、机械臂和视觉传感器集成在一起,以实现自主移动和抓取操作。
在Husky移动抓取中,机器人首先使用视觉传感器对周围环境进行感知和建图,确定目标物体的位置和姿态。然后,机器人计算出机械臂的运动轨迹,并控制机械臂进行抓取操作。最后,机器人将目标物体移动到指定位置,并完成抓取任务。
Husky移动抓取技术的优点在于它可以大大提高机器人的灵活性和适应性,使机器人可以在复杂的环境中进行移动和抓取操作。此外,Husky移动抓取还可以提高生产效率和质量,减少人力成本和风险,适用于各种工业和服务领域。
总的来说,Husky移动抓取是一种先进的机器人技术,可以使机器人在移动的同时完成抓取任务,具有广泛的应用前景。
是一种远程操作平台,由美国公司 开发。它是一种基于机器人技术的远程操作系统,可以实现人机协同和远程操作,适用于各种危险和高风险环境下的任务。
远程操作平台主要由三个组成部分组成:机器人、远程操作站和传感器。机器人是一款具有高度机动性和灵活性的机器人,可以在复杂的环境中进行移动和操作。远程操作站是一种基于虚拟现实技术的远程操作界面,可以实现远程操纵和监控机器人的运动和状态。传感器是一种用于感知环境和获取数据的设备,可以为机器人提供高精度的定位和环境感知能力。
远程操作平台的应用领域非常广泛,如军事、消防、救援、建筑、采矿、能源等。在军事领域,可以用于探测、侦察、搜救等任务,可以提高军事行动的效率和安全性。在消防和救援领域,可以用于火灾、地震、洪水等灾害的救援和搜救,可以提高救援效率和减少人员伤亡。在建筑、采矿和能源领域,可以用于危险和高风险环境下的任务,可以提高生产效率和质量,减少人力成本和风险。
总的来说,远程操作平台是一种先进的远程操作系统,可以实现人机协同和远程操作,适用于各种危险和高风险环境下的任务,将为各种应用领域带来更高效、更安全的解决方案。
脑电系统是一种基于脑机接口技术的神经科学和医疗设备,由美国公司开发。它可以通过脑电信号来实现人机交互和控制,适用于各种医疗和研究领域。
脑电系统主要由两个组成部分组成:脑电传感器和软件平台。脑电传感器是一种用于记录脑电信号的设备,可以将脑电信号转化为电信号,并将其传输到计算机上进行处理和分析。软件平台是一种基于人工智能和机器学习技术的软件系统,可以解析脑电信号,并将其转化为控制信号,实现人机交互和控制。
脑电系统的应用领域非常广泛,如医疗、游戏、虚拟现实等。在医疗领域,脑电系统可以用于帮助残疾人士实现肢体运动控制,如瘫痪、失明等,以及帮助治疗神经系统疾病,如帕金森病、脑卒中、阿尔茨海默病等。在游戏和虚拟现实领域,脑电系统可以用于实现更加自然和直观的人机交互方式,提高游戏和虚拟现实的沉浸感和体验。
总的来说,脑电系统是一种先进的基于脑机接口技术的神经科学和医疗设备,可以通过脑电信号来实现人机交互和控制,将为各种应用领域带来更加前沿和创新的解决方案。
目标识别,也称为目标检测,是一种计算机视觉技术,涉及在图像或视频中识别和定位物体。它是计算机视觉的基本任务之一,广泛应用于机器人、监控、自动驾驶和增强现实等领域。
目标识别算法通常使用深度学习技术,如卷积神经网络(CNN),从图像或视频帧中提取特征。这些特征然后用于对物体进行分类和估计其在图像或视频中的位置和大小。目标识别算法还可以被训练以检测同一图像或视频帧中的多个物体,并在多个帧之间跟踪物体。
目标识别有各种方法,包括基于区域的方法、滑动窗口方法和基于锚点的方法。基于区域的方法,如 R-CNN和Mask R-CNN,将图像分为一组区域,并将每个区域分类为包含物体或不包含物体。滑动窗口方法,如YOLO(You Only Look Once),在不同的比例和位置上滑动窗口,并将每个窗口分类为包含物体或不包含物体。基于锚点的方法,如SSD( Shot ),使用预定义的锚框在图像中检测不同比例和位置的物体。
目标识别具有许多实际应用,如物体跟踪、图像搜索和自动化监控。它也是实现自主车辆(例如自动驾驶汽车)感知和对周围环境做出反应的关键技术。
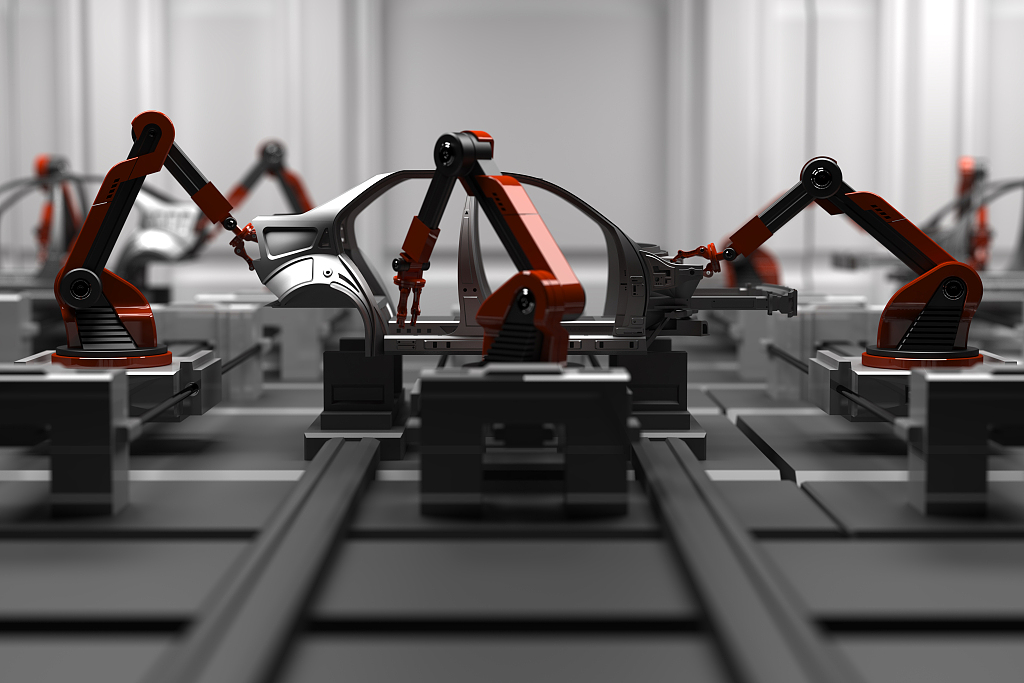
抓取,也称为机器人抓取,是机器人系统的一项基本能力,涉及在环境中拾取和操纵物体。抓取是机器人技术的重要研究领域,广泛应用于制造、物流和医疗保健等领域。
机器人抓取通常涉及检测和识别环境中的物体,规划抓取策略,并使用机器人手臂执行抓取。抓取规划算法考虑物体的形状、大小和方向,以及夹爪和环境的特性。抓取规划的目标是找到一个稳定且安全的抓取方式,并允许机器人按照预期的方式操纵物体。
机器人抓取可以使用多种不同类型的夹爪,包括平行夹爪、吸盘夹爪和机械手。夹爪设计取决于应用要求,以及物体的大小、形状和材料特性等因素。
近年来,随着深度学习和计算机视觉的进步,机器人抓取取得了重大进展。深度学习算法可用于识别环境中的物体,并基于视觉输入规划抓取。计算机视觉技术也可用于估计环境中物体的姿态和方向,从而改善抓取规划和执行。
机器人抓取具有许多实际应用,如制造和物流中的拾取和放置操作,以及医疗保健中的辅助机器人。它是使机器人与物理世界互动并在非结构化环境中执行复杂任务的关键技术。
是由 开发的人形机器人,该公司成立于2008年,由著名机器人研究员和联合创始人 创立。该机器人设计具有多功能和适应性,拥有两只手臂和一系列传感器和摄像头,使其能够感知和与环境进行交互。
主要用于工业和制造领域,可以执行各种任务,如组装、包装和检查。该机器人旨在与人类操作员一起工作,并可以使用简单的拖放界面快速、轻松地进行编程。
的手臂设计具有柔性,即它们可以灵活、适应性地移动和响应外部力量。这使机器人可以安全地与人类操作员一起工作,并处理各种形状、大小和重量的物体。
配备了一系列传感器和摄像头,使其能够感知和响应环境。该机器人的头部装有两个摄像头,可以提供世界的3D视图,以及一组声纳传感器,可以检测附近的物体。 的手臂还配备了力传感器,可以感知机器人是否与物体接触,并相应地调整其运动。
于2018年被HAHN Group收购,机器人已经停产。但是,背后的技术和概念继续影响着协作机器人和工业和其他领域的人机交互的发展。