坐标转换tf
在src文件下新建一个.cpp写入以下代码
// 头文件包含
#include 修改.txt文件
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES} )
编译: 在.中添加以下代码:
运行
.
效果
一般一步实现了前面例子的乌龟跟随
运行
分析是跟着跑还是跟着跑?
添加一个坐标系 为什么要添加坐标系? 操作小记
在src//src下创建文件.cpp,写入以下代码:
#include 在.txt中添加如下代码:
add_executable(frame_tf_broadcaster src/frame_tf_broadcaster.cpp)
target_link_libraries(frame_tf_broadcaster ${catkin_LIBRARIES})
编译:
在.中添加如下代码:
运行 .
运行命令查看tf树:
此时,操作键盘控制乌龟移动,发现跟之前的行为并没有什么区别
在.cpp文件中做以下修改:
try{listener.waitForTransform("/turtle2", "/carrot1", ros::Time(0), ros::Duration(10.0));listener.lookupTransform("/turtle2", "/carrot1", ros::Time(0), transform);
}
重新编译运行,查看效果跟之前的区别
之前,我们创建了一个固定关系的坐标系,它相对于父级是不会变化的。现在创建一个动态的坐标系
修改.cpp中对应的代码:
while (node.ok()){transform.setOrigin( tf::Vector3(2.0*sin(ros::Time::now().toSec()), 2.0*cos(ros::Time::now().toSec()), 0.0) );transform.setRotation( tf::Quaternion(0, 0, 0, 1) );br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));rate.sleep();}
编译运行,观察现象
tf和时间 操作小记
打开.cpp,原来代码为:
ros::Time(0)参数指的就是获取当前最新的转化关系,将代码做如下修改:
该段代码是指获取当前时间点的转换关系
编译:
运行: .
运行时会出现一个错误:该错误是由于的生成需要一定的时间,当我们第一次要询问转换关系时,还没有生成
如何获取5S前的坐标系转换关系?
修改代码如下:
编译:
运行: .
感觉第二只小乌龟完全不受控!
原因在于,我们获取的相对关系是5s前的,5s前的和之间的关系
如何让跟着 5s前的位置运行呢?
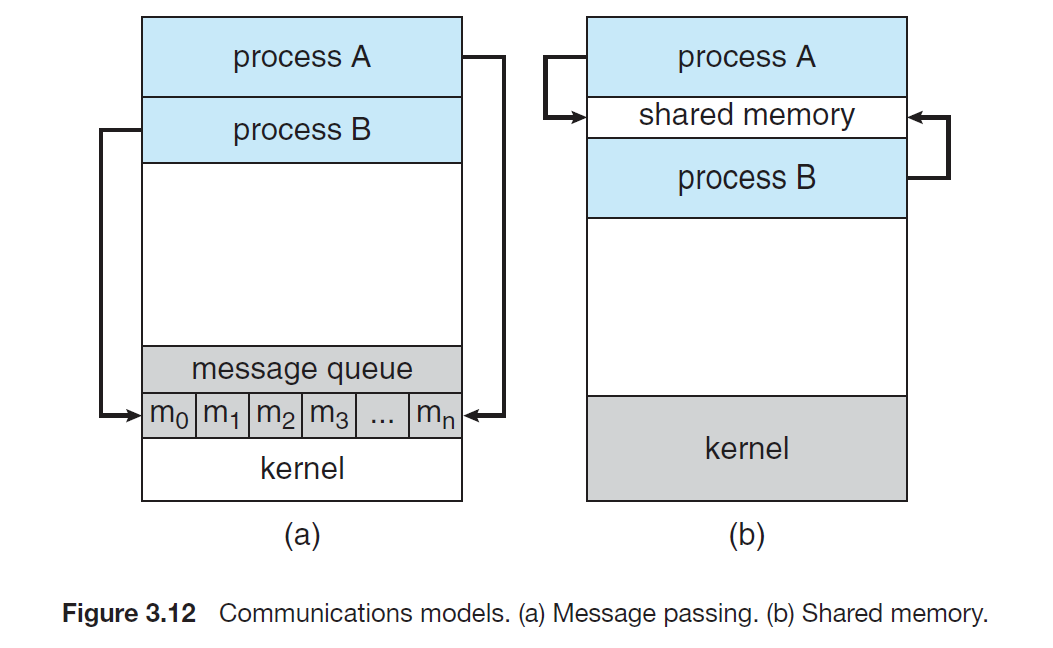
一共包含了6个参数:
要转换的目标坐标系;在什么时间;源坐标系;在什么时间;不随时间变化的坐标系;存储结果的变量
上图显示了坐标系转换的过程:
tf计算在past的时间点和世界坐标系之间的关系随着时间推移到达现在的时间点,计算和世界坐标系之间的关系tf计算当前和past时间点之间的关系
编译:
运行: .