(个人)太极拳学习系统创新实训第三周(二)
本周任务:
这次我将主要介绍基于 4的VR项目实现VR交互,因为我已经实现了右手分离,我将完成右手部分的蓝图。
添加右手手柄:
现在左右手柄已经分离,并且中右手部分的蓝图被删除,右手手柄不能运作。为了能够使右手手柄发挥作用要新建一个右手的蓝图,然后为这个蓝图添加函数和事件。
创建右手的蓝图:
在“添加新项”->“蓝图类”中选择"Actor"创建蓝图:
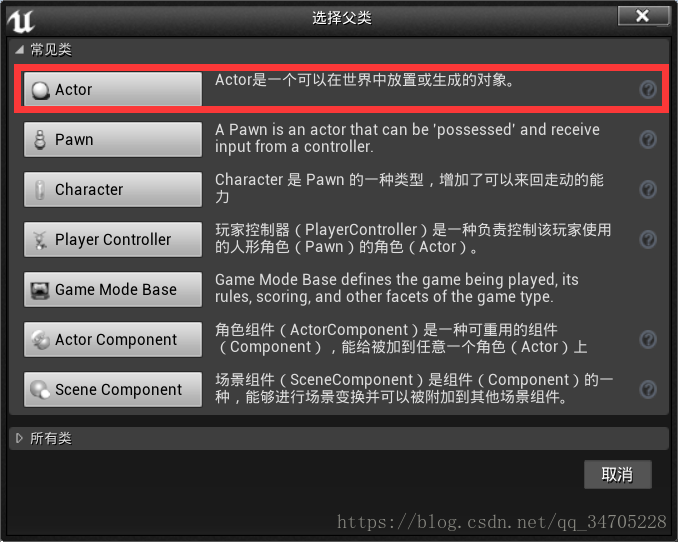
生成新的蓝图:

在蓝图中添加组件:
首先在组件栏添加组件,并将 的属性改为Right(绑定右手手柄)。再添加子节点 Mesh,命名为:,下再添加组件。

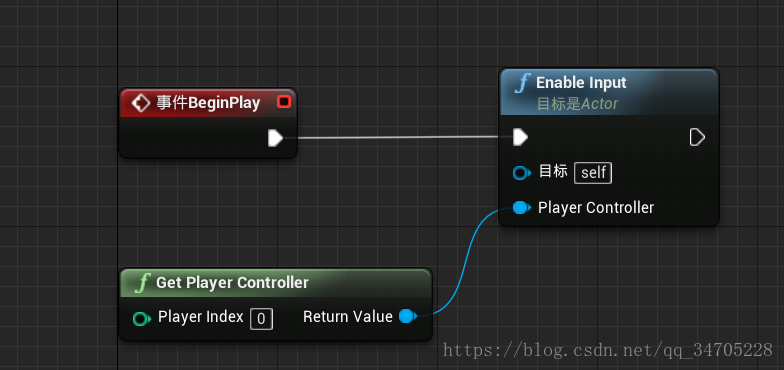
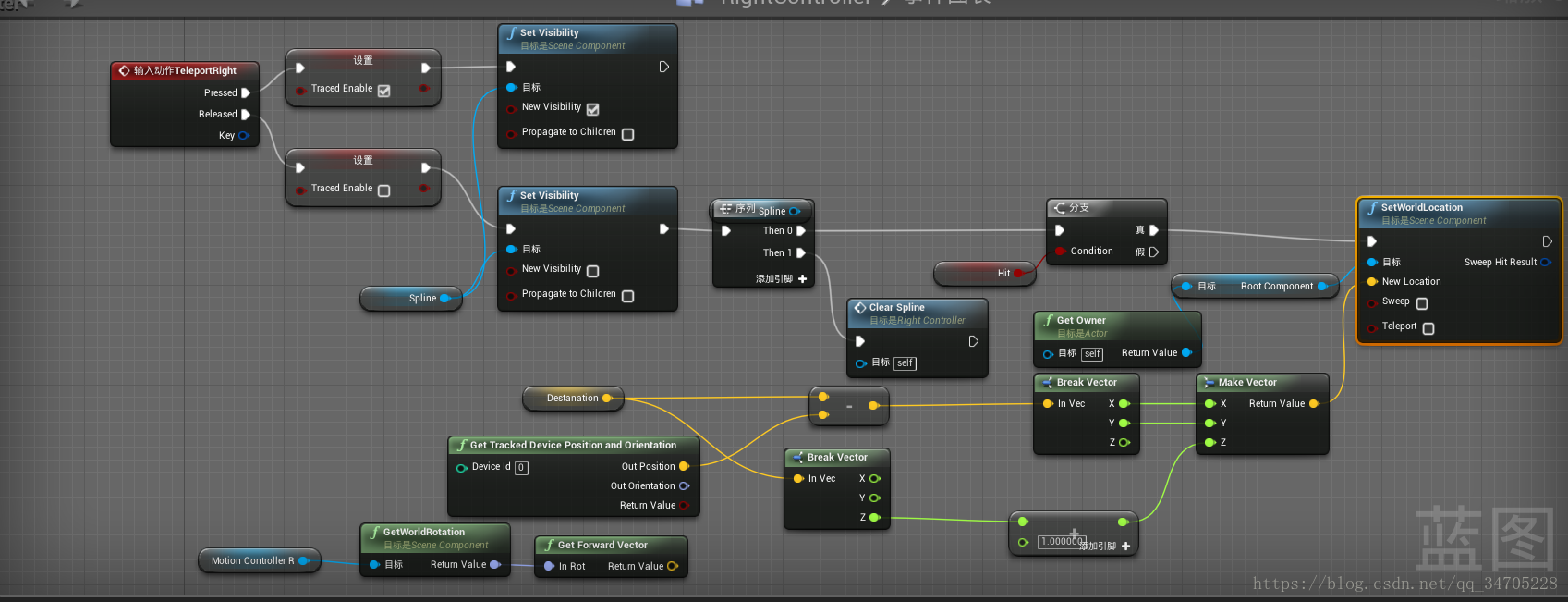
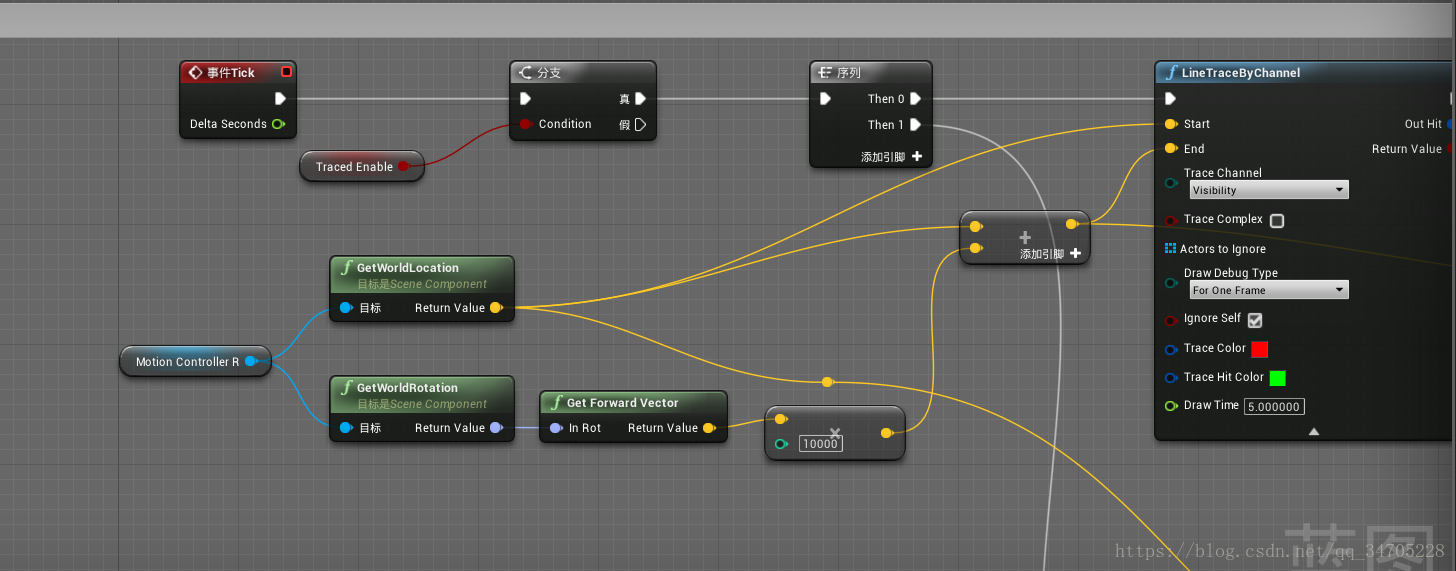
然后连接蓝图:
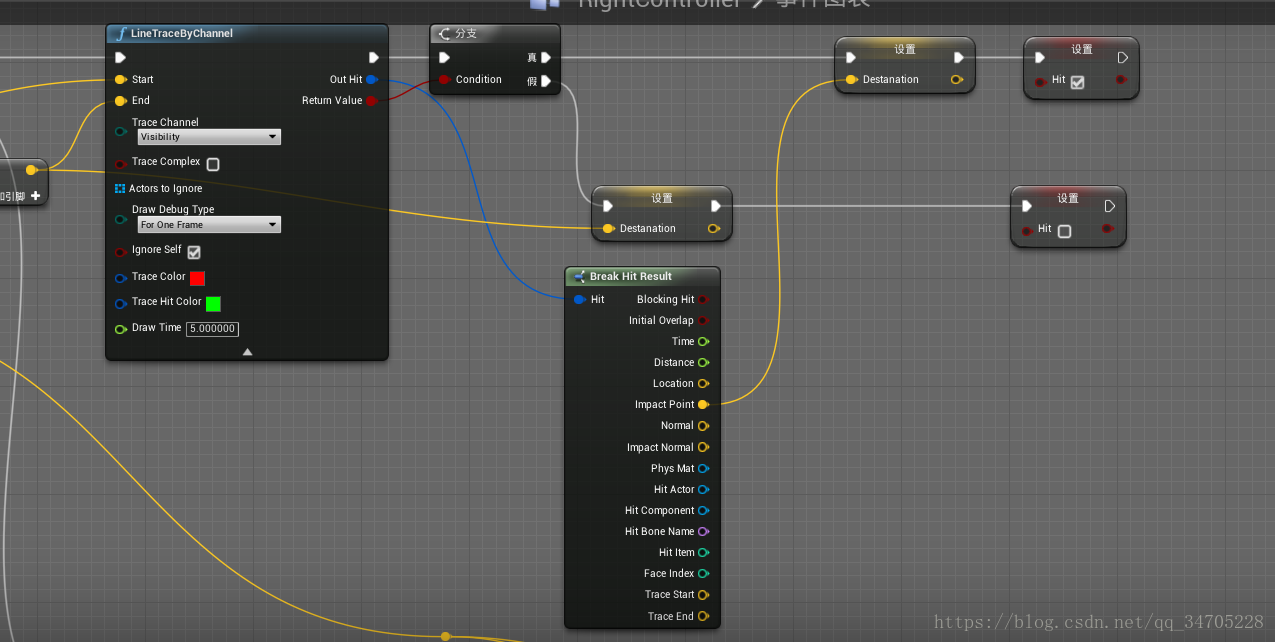
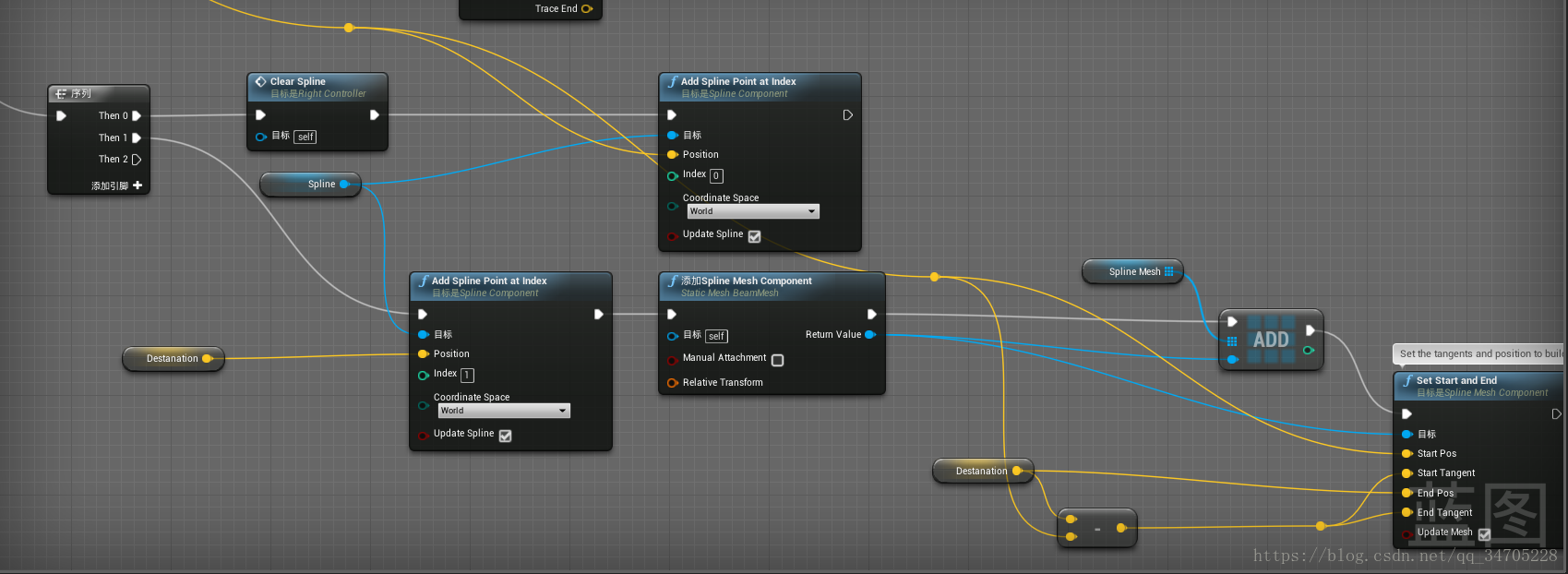
因为要在 中添加Mesh,所以我要首先学习如何将将静态网格模型导入到 。在此之前我先在MAYA中制作一个模型。然后打开
导入模型:

找到模型的位置添加进去:
导入模型成功后会出现一个菜单,可以有更多的选择项供改变功能,但是一般默认情况下就可以。
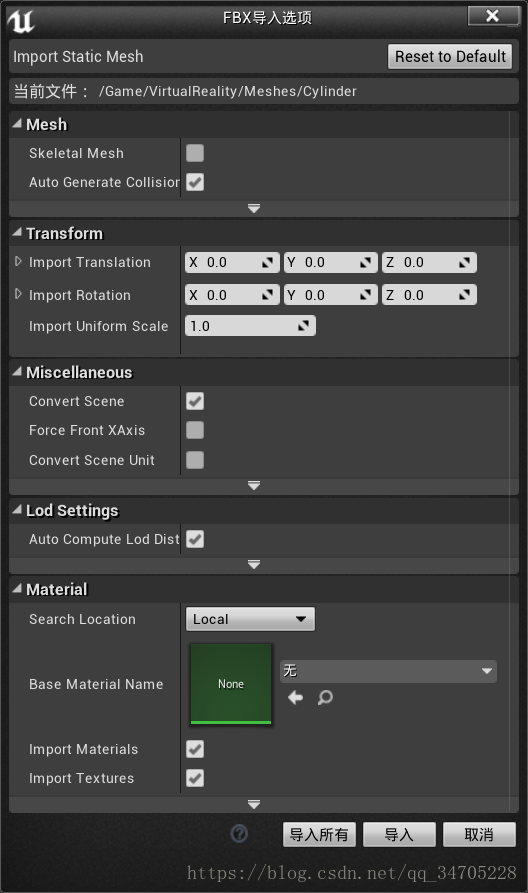
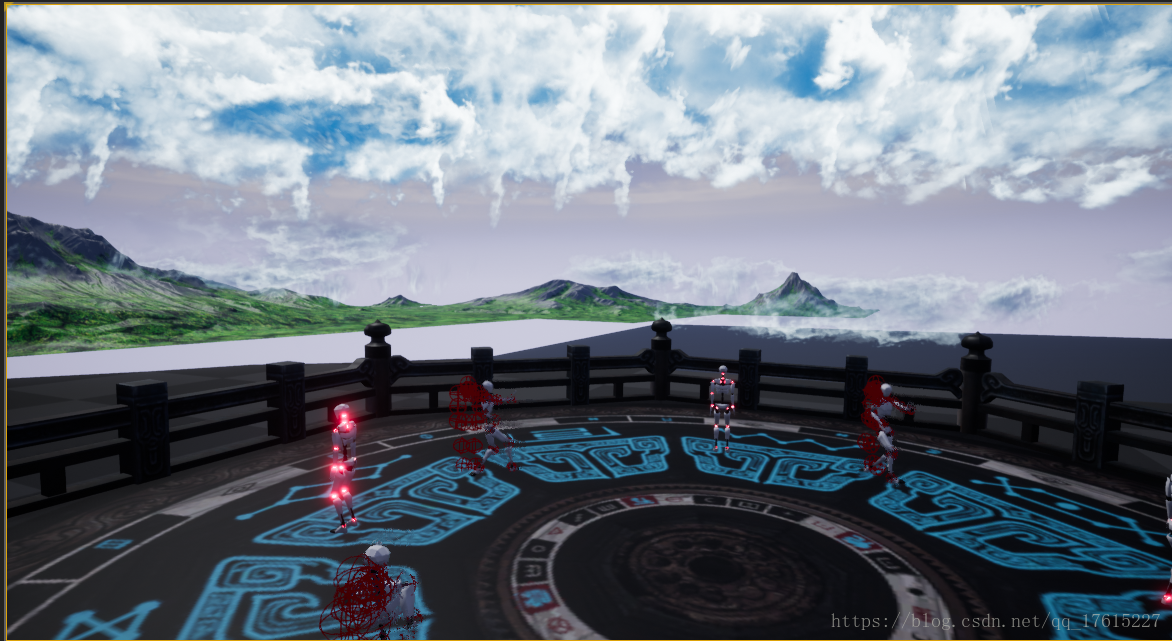
到目前为止我们已经将模型导入到 中,我们可以向拖动其他资源一样将它拖到场景中去。
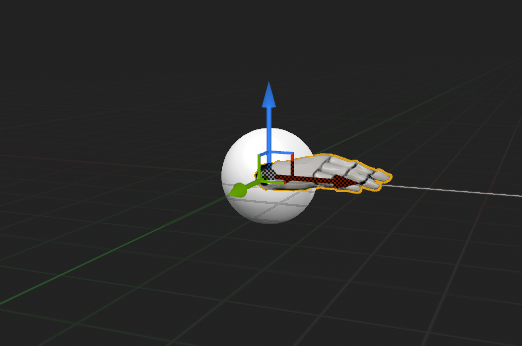
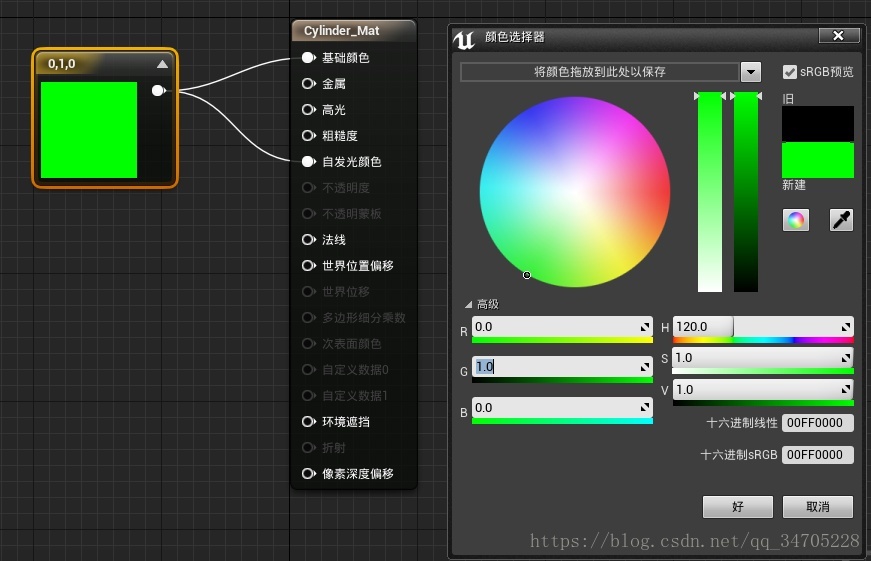
成功将MAYA模型导入后,我们创建一个绿色的材质:
将模型与绑定在一起:
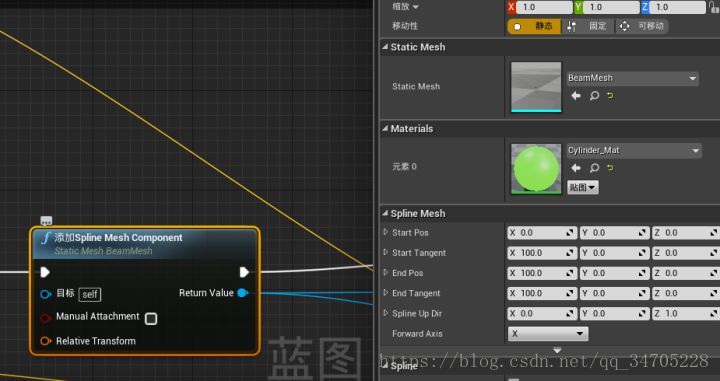
完成基于 的VR交互。
tags:
系统学习