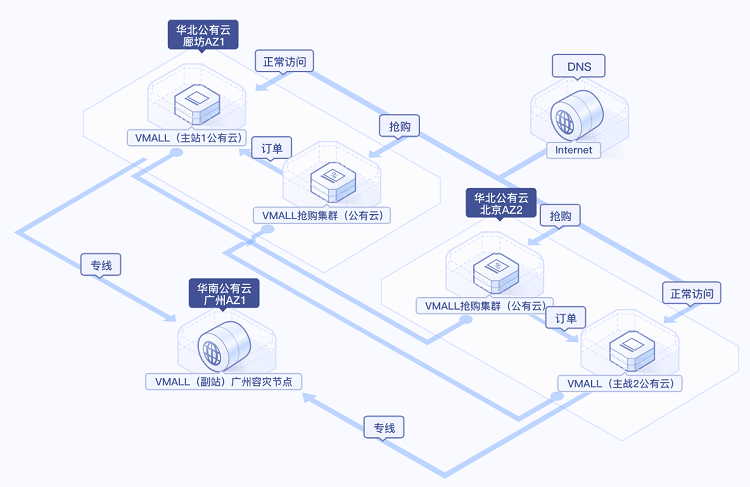
三维成像激光雷达扫描控制1
控制器
光学调整架PIM1
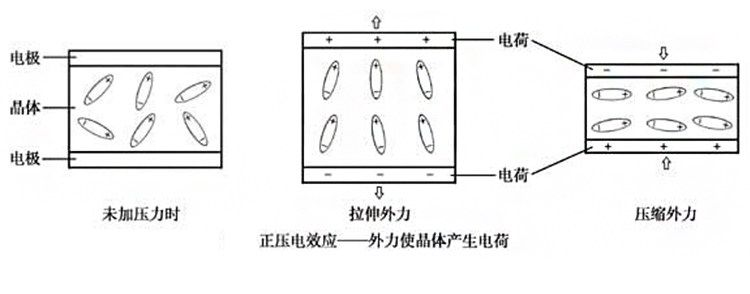
压电堆栈垂直于丝杠轴安装,通过一种以系统惯性和摩擦系数为基础的设计来驱动丝杠。压电器件的每一侧各有一个夹持臂。它们可围绕主丝杠的顶部和底部延伸。如右图所示。
该压电器件在受到自定义锯齿电压波形后,会扩张或收缩。该波形是不对称的,会缓慢提升到指定电压,再在纳秒级的时间范围内快速下降到零。如左边的下图所示,夹持臂会在电压缓慢上升过程中"粘住"丝杠,类似于人手用拇指和食指旋转螺丝的过程。纳秒级时间内的电压降会由于丝杠的惯性和摩擦系数的不同,导致夹持臂“滑动”,并使夹持臂返回其原始位置。该设备的"粘滑效应"利用非常短的脉冲宽度,使驱动器连续步进,将会导致一般为60至70 dB的可听噪音。这种机制使得单个压电元件可沿着整个长度平移丝杠。
由于一系列因素,比如应用条件、压电迟滞、组件差异和轴向负载等,所得的步长会有变化,而且无重复性。如要消除这种变化,需要使用一个外部反馈系统。另外,根据应用也可以使用步进电机驱动器替代。
压电惯性"粘滑"电机原理详解