ADAS辅助驾驶之:BSD盲区监测功能
摘要:
盲点监测系统从技术上主要分为影像和雷达2种,2种技术路线各有优劣。
目录
1、车辆盲区监测系统的定义
2、车辆盲区监测系统原理
3、车辆盲区监测系统硬件安装及标定
4、车辆盲区监测系统发展
1、车辆盲区监测系统的定义
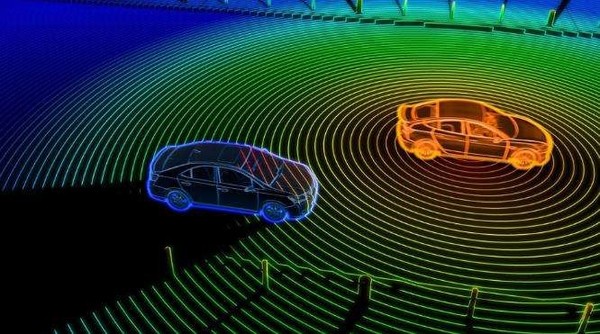
盲区监测系统(BSD)通过毫米波雷达传感器来监测本车侧后方盲区区域,并获取目标位置、相对速度、行驶方向等信息。一旦监测到有车辆处于视角盲区位置或以很快的速度从后面接近本车,通过车辆外后视镜上的警告信号、声音等声光等形式来提醒司机注意。
车辆在变道行驶时,由于转弯时后视镜存在视野盲区,驾驶员仅凭后视镜的信息是无法完全判断后方车辆的信息。恶劣天气(雨雪、大雾、冰雹等)增大了驾驶员的判断难度,增加了汽车在变道行驶时碰撞或刮擦的风险。
车辆盲区监测系统的示意图
盲点监测系统从技术上主要分为影像和雷达2种,2种技术路线各有优劣。
1.影像:影像顾名思义就是通过在车辆上加装摄像头的方式,对车辆盲区进行监测,摄像头主要加装在两侧后视镜和车尾,以影像方式监控车辆后方是否有来车,但采用影像的技术方式,在恶劣天气(大雨、大雾等)下就会表现不佳,极易产生误判。
2.雷达:盲点监测系统使用的雷达主要为24 GHz和77 GHz的短波雷达,将雷达安装于车侧或后保险杠处,通过发出微波侦测车辆两侧及车尾来车,在车辆行驶速度大于10KM/H自动启动,实时向左右3米后方8米范围,发出探测微波信号,系统对反射回的微波信号进行分析处理,即可知后面车辆距离,速度和运动方向等信息,通过系统算法,排除固定物体和远离的物体,当探测到盲区内有车辆靠近时,指示灯闪烁,此时驾驶员看不到盲区内的车辆,但是也能通过指示灯知道后方有车辆驶来,变道有碰撞的危险,如果此时驾驶员仍然没有注意到指示灯闪烁,打了转向灯,准备变道,那么系统就会发出“哔哔哔”的语音警报声,再次提醒驾驶员此时变道有危险,不宜变道。通过整个行车过程中,不间断地探测和提醒,防止行车过程中因恶劣天气,驾驶员疏忽,后视镜盲区,新手上路等潜在危险而造成交通安全事故。相较于采用影像的技术方式,雷达的方案不受天气的影像,且微波不依赖于空气传送,因此微波的侦测能力和车辆的行驶速度也没有关联。
毫米波雷达感知是一种无线感知技术,其它传感器相比,雷达感知具有许多独特的优势。受雾雨雪等恶劣气候条件影响小、不受光线明暗的影响,具有穿透遮挡物的能力;与超声技术相比,雷达感知的距离更远。以下均已雷方方案为主。
2、车辆盲区监测系统原理
毫米波雷达感知是一种比较重要的环境感知手段,通过分析雷达接收到的目标回波特性,提取目标的位置、运动特性和运动轨迹。汽车碰撞预警雷达主要工作于 24GHz、77GHz频段,24GHz 雷达因其频段相近和广泛应用,也被业内统称为毫米波雷达。
本文设计了一种基于 24GHz 雷达的汽车盲区监测系统,通过雷达高频电路收发回波处理和信号检测,完成目标的探测和跟踪,最后结合各种预警功能算法,输出相应警示信号。该系统雷达测距、测速和方位处理基本工作原理如图所示。
雷达采用线性调频连续波模式,通过上下扫频联合处理,可同时解出目标的速度和距离信息。调频带宽 B 决定距离分辨率,调频周期T 影响系统的频率分辨率;各参数需综合折衷考虑,以满足整机系统指标要求。
△fL 为距离差频,△ fd 为相对速度造成的多普勒频偏,那么有如下公式:
通过联立解方程组,分别会得到距离差频△ fL 和多普勒频偏△ fd,从而得到目标的距离和速度信息,△ fd 的正负表示目标相对速度的方向。
相位测角法是利用不同接收通道同一时刻的相位差计算出目标角度,相位测角法的原理框图如图所示。
图中,θ 为目标径向方向与天线法线方向的夹角,d 为天线间距,λ 为回波信号的波长。
目标方向角θ 的计算公式:
3、车辆盲区监测系统硬件安装及标定
车辆保险杠匹配
毫米波雷达安装在车辆后保杠的两侧,当有车辆出现在雷达覆盖区并满足报警条件时,驱动指示灯和蜂鸣器进行报警。
在雷达安装使用过程中,考虑到保险杠形状、材质及周围物品影响所带来的测角误差,采用单独匹配校准方式,确保了目标定位的准确性。标校情况如图所示。
下线标定
在整车厂完成雷达车辆装配后,对雷达的实际安装角度误差进行系统修正。综合考虑标定工位大小、标定环境等因素,采用固定点目标的方法实现了雷达安装角度的快速标定。
4、车辆盲区监测系统发展
随着技术的发展,自动驾驶时代终究会到来,在自动驾驶技术普及后,盲点监测系统还有存在的意义吗?从前文我们可以了解到,盲点监测系统的本质还是通过监测车辆两侧及后部盲区是否有车辆进入,从而通过声音或光亮来提醒驾驶员行车安全,主要还是辅助驾驶员驾驶的一种技术。自动驾驶实现的前提是车辆的驾驶过程无需驾驶员的参与,在那时,盲点监测系统是否还有存在的必要?
其实,在自动驾驶技术普及后,车辆行驶的任务被交由了车辆自身,道路路况的识别依旧十分重要,对道路的多样化监测,将确保车辆自动驾驶时的安全。盲点监测系统也会随着自动驾驶技术的升级转变为另一种形式。
在L4级别自动驾驶时:
车辆虽然可以实现自主驾驶的功能,但还是需要安全员来辅助识别路况,在出现必要状况时,还是需要安全员来接管车辆,此时盲区监测系统将会和现在一样发挥自身作用,当车辆盲区出现车辆或行人时,依旧会通过声光来提醒安全员,从而确保车辆驾驶的安全。
当自动驾驶技术达到L5级别时:
安全员的角色也不再需要,此时盲区监测系统将会转变为道路监测系统,不断进行道路状况的监测,给车辆提供更完善的道路状况,声光提醒也将消失,车辆将自主实现车辆两侧及后方来车的识别,给系统进行路况数据采集,以便让系统做好驾驶预判,给乘客提供完善的自动驾驶服务。
高级辅助驾驶系统的发展将是逐渐递进的,现有的高级辅助驾驶系统更多是辅助驾驶员安全行驶,随着自动驾驶技术的提升,这些辅助驾驶员行驶的高级辅助驾驶系统也将得到技术的提升,转变为自动驾驶技术中另一种技术方向。
来源 |无人驾驶俱乐部